Resumen: Este documento muestra un análisis de los resultados de búsqueda de literatura sobre sistemas tecnológicos de apoyo a personas víctimas de diversos eventos que implican perdida de movilidad en algún grado, requiriendo de desarrollos como la robótica asistencial. Se usa la guía PRISMA 2020 como referente de la revisión sistemática. Se consultó en la base de datos Scopus publicaciones sobre robótica y víctimas de la violencia de los últimos tres años, se construyeron redes bibliométricas con Vosviewer, se filtraron los resultados, se caracterizaron y se agruparon por la atención a víctimas tras desastres y enfermedades. Se concluye, es necesario encaminar los esfuerzos en robótica hacia la atención de víctimas de la violencia en Colombia apoyado en los avances identificados documentados a nivel científico dada la ausencia de evidencia al respecto.
Palabras clave: Inteligencia artificial, Robótica, Robótica asistencial, Sistemas tecnológicos de apoyo, Víctimas de la violencia.
Abstract: This document shows an analysis of the results of a literature search on technological support systems for people who are victims of various events that involve loss of mobility to some degree, requiring developments such as assistive robotics. The PRISMA 2020 guideline is used as a reference for the systematic review. Publications on robotics and victims of violence from the last three years were consulted in the Scopus database, bibliometric networks were built with Vosviewer, the results were filtered, characterized and grouped by care for victims after disasters and diseases. It is concluded that it is necessary to direct efforts in robotics towards the care of victims of violence in Colombia supported by the identified advances documented at a scientific level given the absence of evidence in this regard.
Keywords: Robotics, Artificial Intelligence, Assistive Robotics, technological support systems, victims of violence.
1. INTRODUCCIÓN
La robótica inicia su auge en los años setenta y ochenta, sin embargo, logra su mayor consolidación en los años noventa, esto se refleja en su aceptación y particularmente por su demanda a nivel industrial,
, lo que se constituyó como el inicio de la Era Robótica.
En los años 2000 la robótica tuvo grandes avances, llegando a lo que actualmente se conoce como robótica inteligente, que consiste en la integración de la robótica con la inteligencia artificial. Lo que permitido contar con robots con la capacidad de ejecutar acciones con mayor grado de complejidad y precisión. Independientemente de los avances, se mantiene el objetivo de lograr sistemas autónomos e independientes de la actuación humana capaces de mejorar la calidad de vida de las personas.
Los sistemas de apoyo a personas con necesidades especiales en salud basados en robótica, constituyen un escenario cada vez más cercano y accesible gracias a los avances al respecto. Ya es habitual el termino robot asistencial, que corresponde a robots diseñados para ayudar a personas con necesidades especiales en temas de movilidad, facilidad de acceso y mejor funcionalidad en aspectos tanto físicos como sociales.
En general, la movilidad reducida puede derivarse de condiciones de salud de las personas y/o ser consecuencia natural del envejecimiento, sin embargo, en países con conflicto interno como Colombia también puede ser resultado de ser víctima de la violencia, aún en un periodo de posacuerdo con las FARC dada la presencia de disidencias y de otros grupos armados que continúan atacando a la población.
El Hospital Militar Central reportó 3600 personas amputadas como parte de las afectaciones negativas derivadas del conflicto armado del país, entre los años 1986 a 2016
. Lo que implicó una inversión cercana a los 3 millones de dólares para la atención de soldados mutilados, que en su mayoría son personas jóvenes (menores de 35 años) con dificultades en sus miembros inferiores.
Por ello el presente documento tiene como propósito identificar los avances existentes al respecto documentados en textos científicos, que sirva como punto de partida para encaminar los esfuerzos en robótica hacia la atención de víctimas de la violencia en Colombia. Ya que el examen científico de la literatura es esencial para comprender la estructura general y la evolución del dominio
.
2. METODOLOGÍA
Se usa la guía PRISMA 2020
que permite identificar, seleccionar, evaluar y sintetizar estudios y sirve como referente para llevar a cabo la revisión de la literatura de manera transparente.
Para el desarrollo de la presente investigación se llevó a cabo una revisión de la literatura consultada en la base de datos Scopus usando como ecuación de búsqueda inicial: "victims of violence" + AND robotics, la cual no arrojó ningún resultado, por lo que se determinó usar dos ecuaciones de búsqueda: robotics AND victims y robotics AND violence, por considerarse un tema de vanguardia, se restringió la búsqueda a los últimos años. Así los criterios de inclusión iniciales son en esencia: ser un documento científico publicado en la base de datos Scopus, hacer sido publicado en los últimos 3 años (2021 a 2023), y cumplir con las ecuaciones de búsqueda definidas. La última consulta en Scopus fue llevada a cabo el 24/01/2024.
En segundo lugar, para sintetizar y presentar visualmente las relaciones entre los estudios se crearon redes bibliométricas usando Vosviewer.
Posteriormente los autores del presente estudio leen de manera conjunta los resúmenes de los 126 documentos encontrados, y determinan como criterio de exclusión aquellos que en su contenido no presentan aplicaciones robóticas que ayuden a personas, de allí y de común acuerdo se eliminan 51 trabajos sin relación directa con la temática estudiada y 2 duplicados, quedando 75 documentos.
Finalmente, los estudios fueron agrupados distinguiendo los aportes de la robótica a víctimas en diferentes escenarios, de un lado para atención tras desastres y de otro lado para atención por consecuencias de enfermedades.
3. RESULTADOS
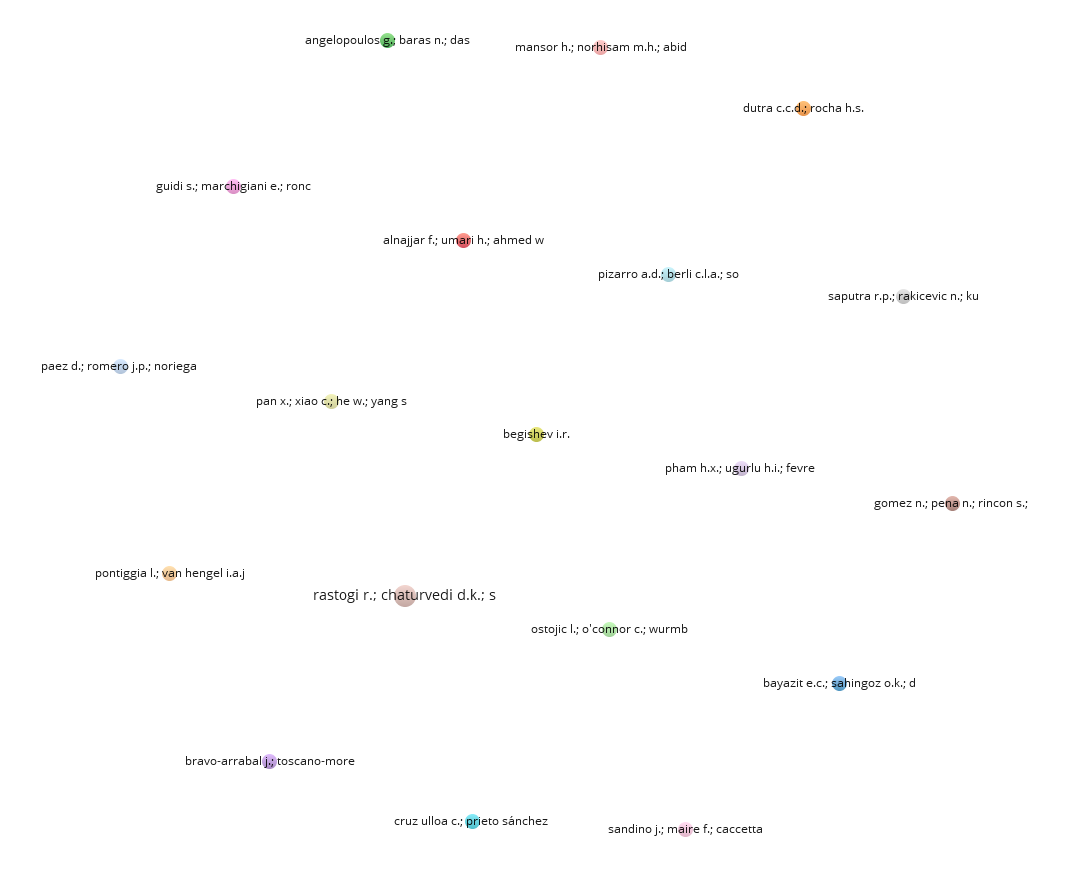
Con el propósito de conocer las relaciones entre los estudios se elaboraron redes bibliométricas usando el software Vosviewer. Para ver la presencia de coautoría, usando a los autores como unidad de análisis con el método de conteo completo, limitando a 10 el número de autores por documento e incluyendo documentos con al menos una citación (Fig. 1a) o con al menos cinco (Fig. 1b), se evidencian la poca conexión en ambos casos. Los autores con más citaciones, quienes podrían considerarse referentes en el tema, son en su orden: Cruz Ulloa C.; Prieto Sánchez G.; Barrientos A.; Del Cerro J.; Dutra C.CD.; Rocha H.S.; Begishev I.R.; Sandino J.; Maire F.; Caccetta P.; Sanderson C.; González F.; Bravo-Arrabal J.; Toscano-Moreno M.; Fernández-Lozano J.J.; Mandow A.; Gomez-Ruiz J.A.; García-Cerezo A. Pontiggia L.; Van Hengel I.A.J.; Klar A.
También para identificar la presencia de coautoría, pero a nivel de organizaciones limitando a 3 el número de entidades por documento, se obtiene la red de la Fig. 2, que relaciona 3 de las 144 organizaciones, estas son: Almaty University of Power Engineering and Telecommunications, Satbayev University y Penza State University.

(a)
(b)
Fig. 1. Grafos de coautoría por autor.
Fuente: elaboración propia usando Vosviewer.
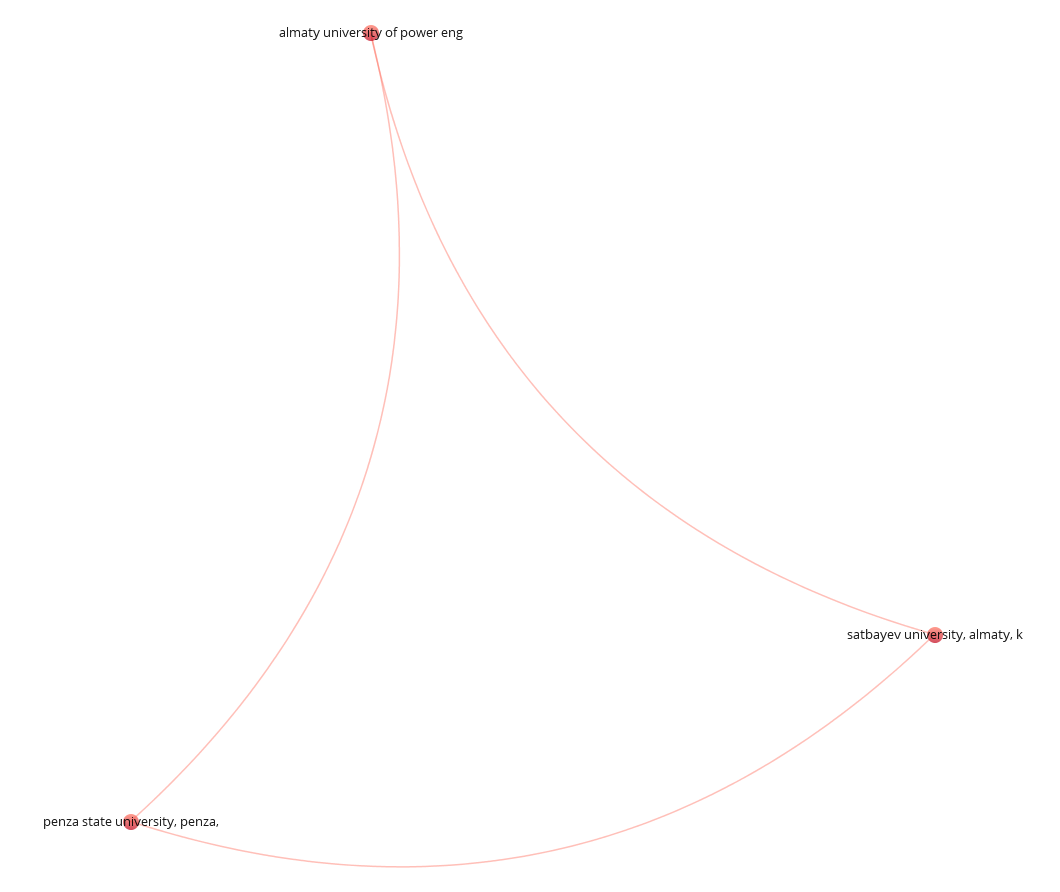
Fig. 2. Red de coautoría entre organizaciones.
Fuente: elaboración propia usando Vosviewer.
Para que los resultados de coautoría entre países fuesen representativos, se limitó a 3 el número de países por documento y a mínimo 3 el número de documentos por país, con ello se obtiene la red de la Fig. 3, que relaciona 12 de las 51 opciones, éstas, según su participación, en su orden son: India, Estados Unidos, España y China. Se destaca que India, a pesar de ser el país con mayor presencia, solo establece relaciones con Arabia Saudita; mientras que Estados Unidos mantiene vínculos con China, España, Noruega y Japón; por otro lado, España también se relaciona con Indonesia, Noruega y Japón.
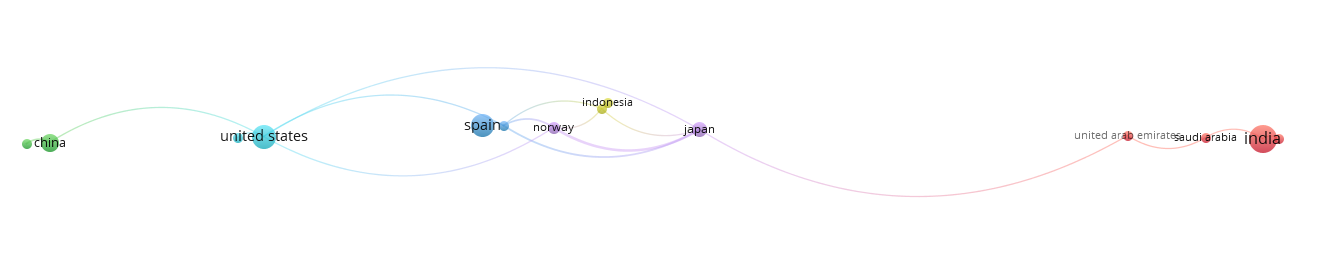
Fig. 3. Red de coautoría entre países.
Fuente: elaboración propia usando Vosviewer.
La red de palabras clave, incluye aquellas que aparecen al menos 5 veces, relaciona 30 de las 1298 existentes (Fig. 4), las más destacadas, en su orden, son: Robotics, search and rescue, disasters, robots, deep learning, computer vision, search and rescue robot, machine design, antennas, internet of thing, mobile robots, drones, human, motion planning, search and rescue operations, ROS, artificial intelligence, swarm intelligence, behavioral research, rescue robot. La red (Fig. 4) permite identificar cinco áreas de trabajo en distintos colores y las interconexiones entre los conceptos. La palabra clave search and rescue es el nodo principal del clúster color rojo y vincula directamente: multi-agent systems, motion planning, behavioral research, exoskeleton (robotics), deep learning y robot programming. Además, search and rescue exhibe una conexión inmediata con el concepto robotics, que corresponde al nodo del centro del clúster presentado en color amarillo, que se entrelaza con: artificial intelligence, human, internet of things y article, y, a su vez, se conecta con disasters que es el nodo central del clúster color verde, que agrupa palabras clave como: mobile robots, search and rescue operations, swarm intelligence, drones y spoofing attacks. El clúster color azul tiene como nodo más representativo robots, e incluye palabras clave como: computer visión, robotics system, convolutional neural networks y search and rescue robot. Por último, el clúster color morado encierra los conceptos: rescue robot, machine design, antennas y rescue robotics.
La visualización de la de citación de fuentes, limitada a aquellos con mínimo 2 documentos por fuente, muestra las 10 de 90 fuentes más señaladas, en la Fig. 5. Estas fuentes no conforman una red, dada la ausencia de relación entre ellas.
Los países con más de 10 citaciones son: España, Estados Unidos, India, Brasil, Rusia, Japón y China.
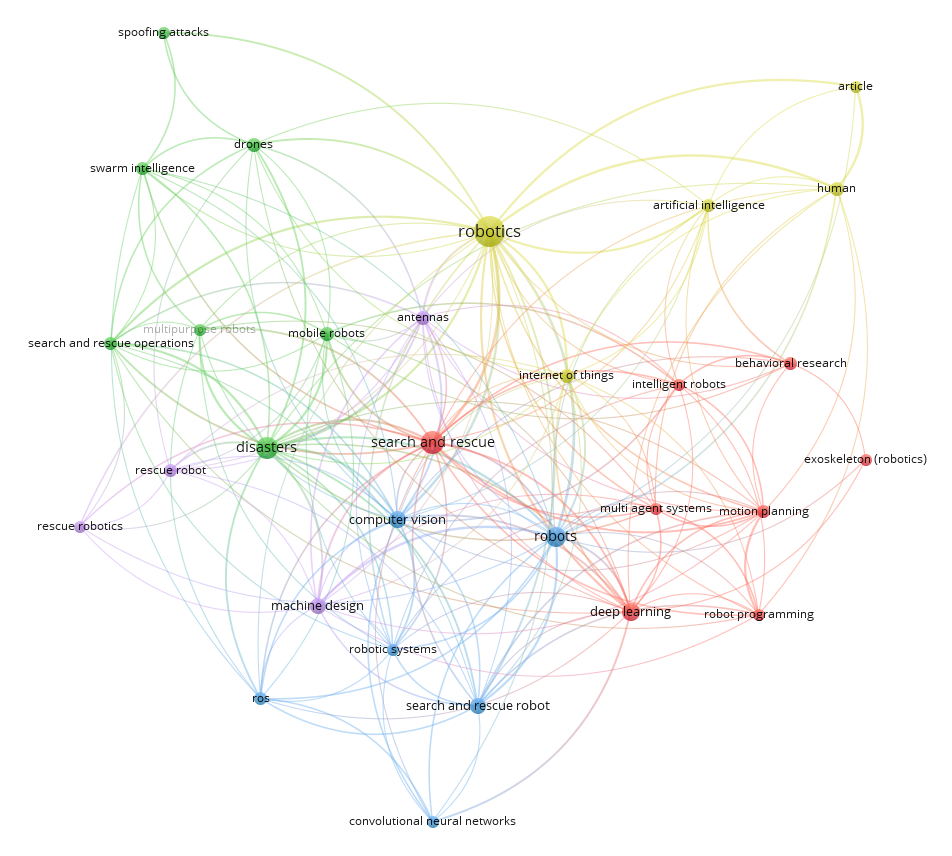
Fig. 4. Red general de palabras clave.
Fuente: elaboración propia usando Vosviewer.

Fig. 5. Grafo de citaciones de fuentes.
Fuente: elaboración propia usando Vosviewer.
La selección de los estudios a incluir en el presente documento surtió el proceso presentado en el diagrama de flujo de la Fig. 6, que muestra en la primera fase los documentos identificados en la base de datos y los eliminados por duplicación, en la segunda fase presenta el cribado de los documentos por fecha de publicación, por ausencia de relación directa con el tema estudiado o por corresponder a la presentación de un evento, para llegar a la fase final donde se señala el total de documentos a incluir en la revisión. Como se observa, el proceso de selección de estudios con criterios de inclusión permitió pasar de 656 a 75 documentos científicos publicados en la base de datos Scopus en los últimos 3 años con las ecuaciones de búsqueda definidas y relacionados con la temática objeto de estudio.
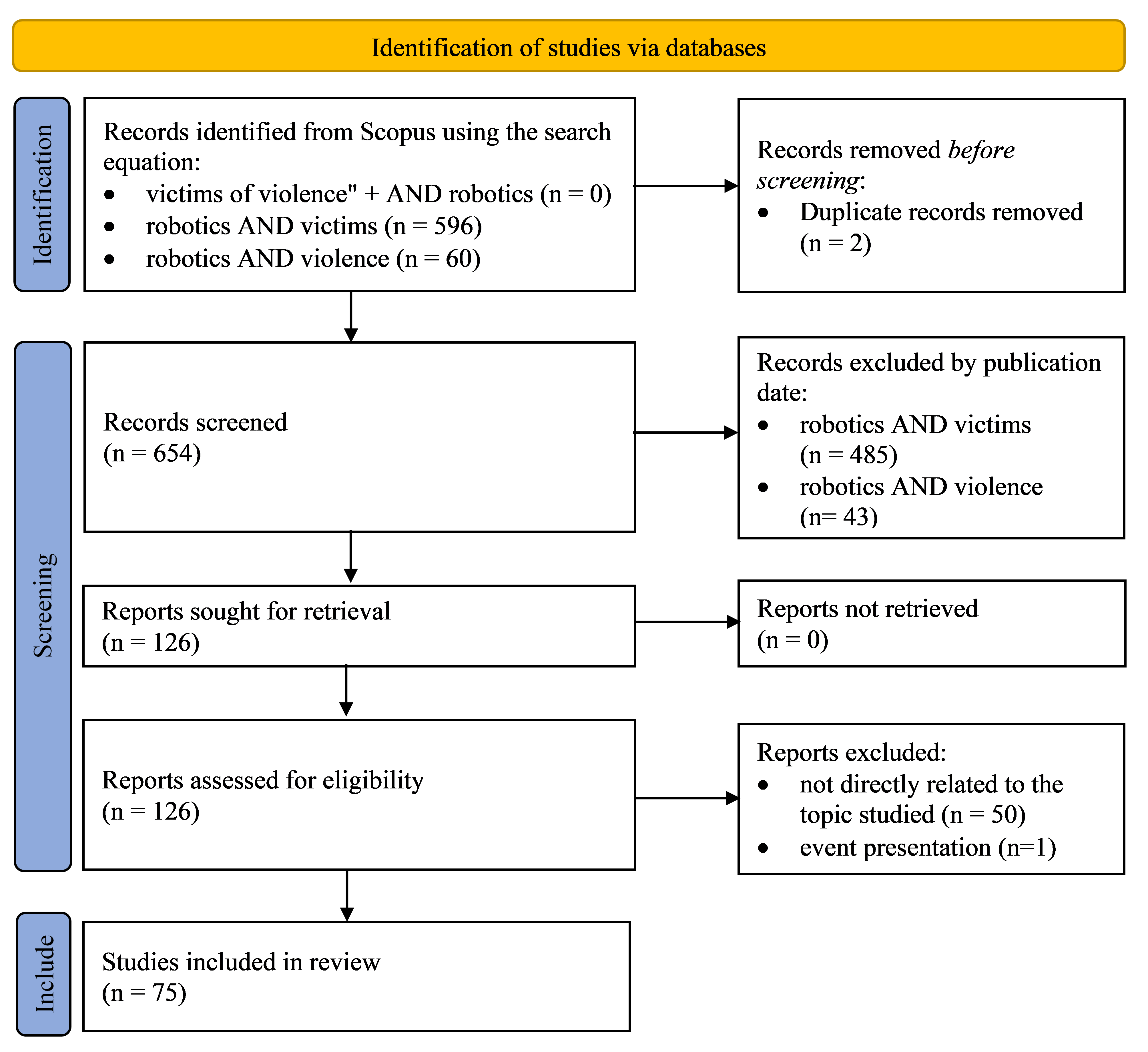
Fig. 6. Diagrama de flujo de la selección de documentos para la revisión de la literatura.
Fuente: Adaptado de
.
A continuación, se presenta la caracterización general de los documentos seleccionados.
En primer lugar, es posible observar en la Fig. 7, la distribución de los años de los documentos analizados: 20 fueron publicados en 2021, 31 en 2022, 22 en 2023 y 2 en 2024, se destaca el año 2022 con la mayor cantidad de documentos publicados.
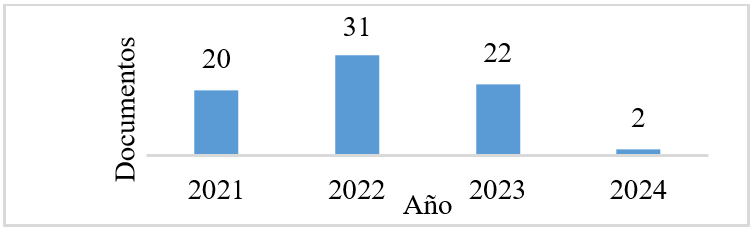
Fig. 7. Años de publicación de los documentos estudiados.
Fuente: elaboración propia.
Por su parte, la Fig. 8 revela que la mayoría de los documentos corresponden a actas de conferencias con un total de 37, seguidos por 31 artículos, además hay 6 capítulos de libro y un artículo de revisión.
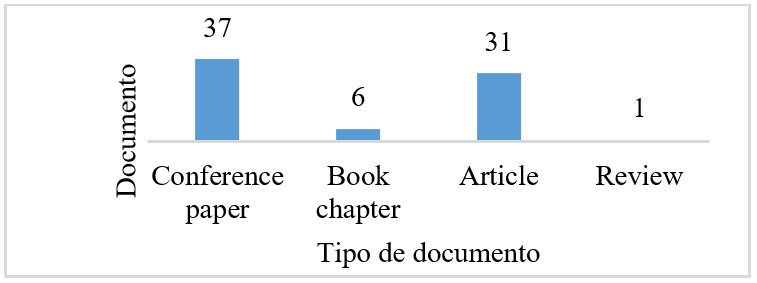
Fig. 8. Tipo de documento.
Fuente: elaboración propia.
El intervalo de citaciones por documento que se muestra en la Fig. 9, varía entre 0 y 19, donde se observa la mayoría no han sido citados. Se observan 16 documentos que tuvieron una sola citación, mientras que la tasa más alta de citaciones, que fue de 19, se registró en el documento Autonomous thermal vision robotic system for victims recognition in search and rescue missions
.
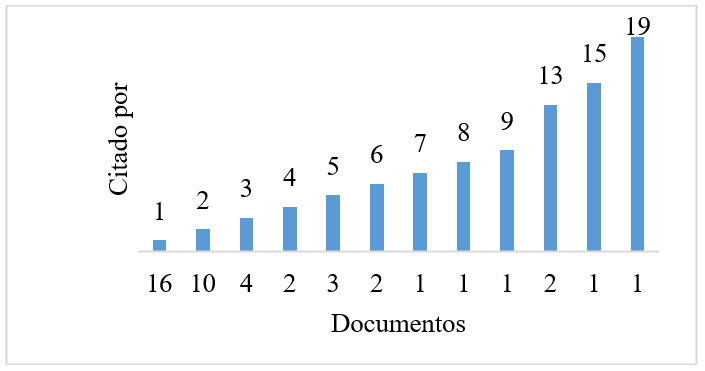
Fig. 9. Citaciones por documento.
Fuente: elaboración propia.
Seguidamente, se presentan las características de los estudios, que fueron clasificados de acuerdo con las aplicaciones para víctimas en dos entornos: desastres (naturales o no) y enfermedades.
3.1. Desastres
Para la atención tras terremotos y deslizamientos de tierra se han creado diversos robots,
diseñaron uno que busca víctimas, recopila datos de voltaje y corriente en cada área para determinar si el suministro de energía es normal, lo que puede usarse como criterio para predecir el colapso y así formular planes de rescate efectivos.
diseñaron otro robot que tiene como objetivo atravesar todos los terrenos, localizar la posición de los sobrevivientes dentro de los escombros para operaciones de rescate rápidas y reducir la necesidad de mano de obra capacitada. Por su parte
proponen un sistema autónomo de detección de víctimas que se implementa en
mediante un robot cuadrúpedo para la captura de datos en ausencia de luz o presencia de escombros y su transmisión a una estación central.
presentan CURSOR (Uso coordinado de equipos robóticos miniaturizados y sensores avanzados para operaciones de búsqueda y rescate), proyecto europeo en curso cuyo principal objetivo es mejorar la eficiencia y la seguridad de las operaciones de búsqueda y rescate urbano en lugares de desastre, su investigación y el proyecto se estructuran en torno a un escenario de terremotos.
simulan sensores transceptores en operaciones de búsqueda y rescate para localizar a víctimas enterradas bajo la nieve.
Con respecto a la respuesta ante incendios,
diseñaron un robot que puede detectar y extinguir incendios domésticos mientras llegan los bomberos.
presenta una descripción de las tecnologías de sensores (único y multisensor) y sus algoritmos para la detección humana en ambientes regulares y con humo, los nuevos enfoques de sensores en ingeniería de incendios están liderados por inteligencia artificial, mapeo 3D y la fusión de múltiples sensores.
señalan que la asistencia robótica ayuda en la búsqueda y rescate de víctimas en incendios urbanos, y la importancia de asociación entre humanos y robots para dar una respuesta más eficaz para la mitigación del peligro para la vida de los primeros intervinientes y de las víctimas. Finalmente,
diseñaron un robot terrestre autónomo que puede obtener en tiempo real datos ambientales relacionados con la presencia de gases peligrosos y de localización, así como un simulador que reproduce estos escenarios de emergencia para planear la misión, así los equipos de emergencia pueden conocer las condiciones del escenario antes, durante y después de la intervención.
En temas de extracción de víctimas,
diseñaron una mano mecatrónica con un módulo de visualización para rescate de personas que hayan caído en pozos.
presentan un robot de rescate móvil que ayuda a los primeros intervinientes a salvar víctimas de una zona peligrosa mediante la extracción tipo camilla garantizando que la operación no cause lesiones adicionales a las víctimas ni ponga en riesgo más vidas.
Según
pueden llevarse a cabo exploraciones de búsqueda y rescate apoyadas en redes neuronales y su aplicación en detección de imágenes; sus resultados muestran que los modelos obtenidos de entornos virtuales se aplican a los reales.
presentan MR-RAS (Realidad Mixta para Asistencia Robótica), para ayudar a los rescatistas y proteger su integridad al explorar áreas tras un desastre, facilitando la guía por gestos del robot y permitiéndoles gestionar información visual del entorno. La interacción Humano-Robot se ejecuta mediante gafas Hololens, el robot detecta víctimas mediante imágenes térmicas, como lo hace
, y también usa imágenes RGB y redes neuronales como técnicas que en conjunto permiten ayudar a las víctimas dándoles equipo médico para reconocer sus condiciones de salud. También,
presentan un nuevo enfoque híbrido para controlar la posición de un manipulador neumático que hace más segura la interacción física entre humanos y robots, ya que puede evitar colisiones entre personas y robots, de los robots con el entorno o entre distintos robots.
desarrollaron un robot móvil para la recopilación de datos de víctimas de desastres que puede operar en terrenos inclinados y rocosos con uso de sensores de bajo precio. Por su parte
crean un sistema inteligente de rescate y vigilancia con robots multifuncionales para mitigar los accidentes en actividades de rescate en situaciones peligrosas. Lo orientan al uso de un robot móvil desplegado en el área para recopilar datos del entorno y obtener video en vivo, este sistema mide las condiciones ambientales que pueden afectar la salud del equipo de rescate y detecta víctimas; el sistema se puede controlar y gestionar remotamente a través de una interfaz de usuario amigable basada en web. En este mismo sentido
diseñan una pequeña plataforma robótica de dos ruedas de búsqueda que reconoce el entorno y encuentra, de manera eficiente, víctimas atrapadas bajo los escombros, permite dar respuesta y apoyar la recuperación tras desastres como terremotos, inundaciones, deslizamientos de tierra, fuertes vientos, explosiones, fallas estructurales, etc. También
presentan un robot con ruedas utilizando dispositivos IoT (sensores ultrasónicos, módulo GPS y cámara de infrarrojos) para navegar de forma autónoma en una región inexplorada, evitar obstáculos e identificar la presencia humana utilizando el modelo SSD Inception V2.
diseñan un manipulador robótico de 9 grados de libertad para ser usado para el rescate y la limpieza de sitios en zonas de desastre.
crearon un robot de búsqueda y rescate todoterreno teleoperado, para realizar diversas tareas, como subir escaleras, superar obstáculos, abrir y cerrar válvulas, maniobrar, inspeccionar plantas, etc.
crearon un sistema robótico multifuncional de búsqueda y rescate que permite monitorear remotamente la zona de desastre en tiempo real, también
crearon el SR2, un robot de búsqueda y rescate para salvar a civiles en peligro en zonas peligrosas.
Para la individualización de víctimas de desastres
formularon un método que permite la colocación de una pulsera sensorizada desmontable que se ubica alrededor del antebrazo de la víctima en un escenario de búsqueda y rescate, con un robot móvil todoterreno.
El uso de vehículos no tripulados ha sido propuesto para diferentes escenarios. Por ejemplo,
plantean localizar víctimas de avalanchas mediante el uso de vehículos aéreos no tripulados con sensor electromagnético.
proponen el uso de vehículos aéreos no tripulados en operaciones de búsqueda, que pueden detectar zonas afectadas por desastres para encontrar personas con imágenes o vídeos térmicas abordando el desafío de malas condiciones climáticas. De igual forma,
desarrollan su investigación con drones mediante el uso de un algoritmo de aprendizaje profundo y visión por computadora para búsqueda de personas durante desastres naturales como inundaciones, erupción de volcanes, incendios forestales, ciclones, terremotos, etc.
presentan el diseño de un buque de superficie autónomo para operaciones de búsqueda y rescate en aplicaciones en aguas profundas para buscar víctimas, cajas negras, escombros u otras pruebas tanto en la superficie como bajo el agua. Así mismo,
usan dos vehículos aéreos no tripulados autónomos en entornos sin GPS para búsqueda y rescate, adicionalmente la ubicación de las víctimas se puede guardar en los mapas generados para ayudar a los rescatistas humanos a localizarlas. También,
crean un prototipo de vehículo terrestre no tripulado, que puede ser controlado y monitoreado por medio de una app de celular, con brazos robóticos duales de cinco grados de libertad que cuando encuentra a una persona herida la hala hacia el interior del vehículo para luego llevarla al punto seguro más cercano.
De acuerdo con
los avances en la autonomía de los vehículos aéreos no tripulados han aumentado su uso en aplicaciones de teledetección, como: seguimiento y vigilancia de desastres, sistemas de autónomo de búsqueda de objetos y planificación de movimientos bajo incertidumbre y observabilidad parcial en entornos al aire libre. A este respecto,
presentan métodos de aprendizaje profundo para la percepción y planificación de carreras de drones autónomos con dos enfoques distintos: descomposición del sistema y planificación de un extremo a otro, en búsqueda de la autonomía de drones a largo plazo para la robótica aérea, que puede usarse para: misiones de búsqueda y rescate en minas subterráneas, detección y seguimiento de víctimas atrapadas bajo edificios derrumbados, detección de radiación aérea en energía nuclear, plantas tras un accidente o exploraciones extraterrestres. Igualmente
crearon un método de sistemas de control por voz para manejar mecanismos robóticos durante operaciones de búsqueda y rescate con un grupo heterogéneo de vehículos aéreos no tripulados que da a los heridos analizadores cardíacos portátiles para evaluar el estado funcional de su organismo y realizar la valoración médica inicial de los heridos y así determinar el orden para brindar asistencia médica de emergencia a las víctimas. Por su parte,
presentan un método iterativo para distribuir tareas de vigilancia y reconocimiento, detección de objetos peligrosos o lugares de emergencia, búsqueda de víctimas, inspección y escaneo de varias áreas en paralelo, entre vehículos aéreos no tripulados cuando el número de tareas excede significativamente el número de agentes.
A nivel de robótica colaborativa para atención tras terremotos
expone el desarrollo de sistemas autónomos de robots móviles cuasi inteligentes, que crean estructuras cuasi sociales para realizar mejor su tarea, pero sin ningún subsistema central de control/gestión observable. En este caso el robot es diseñado para operaciones de rescate tras terremotos en ruinas inestables de ciudad para buscar víctimas enterradas bajo escombros, desenterrar a las víctimas, crear andamios de evacuación, etc.
Según
la exploración robótica autónoma conjunta en áreas de desastres acelera las operaciones de búsqueda y rescate en lugares como el espacio, el océano, el bosque, etc.
, desde el enfoque de la robótica móvil, proponen una metodología para desplegar un equipo de robots móviles impulsados por cable para tareas de exploración y asistencia a víctimas atrapadas en pozos. También
proponen un sistema multirobot donde se sigue a un líder de equipo que conoce la ubicación de la víctima para el desarrollo de tareas de asistencia en zonas de desastre.
presentan una arquitectura distribuida basada en un enjambre de robots, esta solución encuentra víctimas potenciales en un tiempo corto. Asimismo
usan el vuelo secuencial de dos drones, el primero utiliza un algoritmo de localización y mapeo simultáneo mientras explora la zona del desastre en busca de víctimas, el segundo se envía con paquetes de rescate a las víctimas identificadas.
diseñaron un sistema de detección basado en Bluetooth de baja energía transportado por robots terrestres y aéreos, para la localización de víctimas en áreas de desastre complejas y desconocidas.
Los autores
usan robótica en la nube y comunicaciones avanzadas para fomentar un cambio radical en los robots cooperativos y las redes híbridas de sensores inalámbricos para entornos exigentes (como desastres, minería, demolición y zonas nucleares) al permitir el intercambio de datos y recursos computacionales entre equipos de robots y humanos para lograr realimentación de información, implementación de la arquitectura de búsqueda y rescate, planificar rutas, seguimiento y procesamiento de información en tiempo real.
exponen un esquema de control basado en regiones virtuales para explorar un entorno desconocido obstruido por parte de un enjambre de robots con dos características: división y fusión, orientado a aplicaciones de búsqueda y rescate, mejorando la eficiencia del tiempo; con evaluación inicial, mapeo del entorno, monitoreo en tiempo real y operaciones de vigilancia.
presentan un algoritmo que permite al enjambre de robots evitar obstáculos y encontrar posibles víctimas, mediante robótica cooperativa, que acelera el proceso de búsqueda de sobrevivientes evitando colisiones con obstáculos estáticos o dinámicos. También
proponen una arquitectura de software para el Buscador Robótico Subterráneo Miniaturizado diseñado por
para ayudar a los equipos de búsqueda y rescate durante sus operaciones.
Existen varios desarrollos enfocados a la planeación de rutas de ingreso y salida de zonas de desastre,
consideran éste problema en un entorno con obstáculos aplicable a misiones de rescate de desastres naturales; para ello un agente robótico explora los caminos afectados y ayuda a las víctimas a encontrar el mejor camino para ir a un lugar seguro.
incluyen en el diseño de su robot un simulador que reproduce los escenarios de incendio y muestra rutas alternativas para acceder y salir de la escena de forma más rápida y segura. Por su parte
diseñan un algoritmo para la planificación de rutas de vehículos marinos de superficie (USV) no tripulados para localizar a víctimas ahogadas en aguas abiertas. En este mismo sentido
estiman el movimiento en el plano XY (superficie del agua) para ayudar al equipo de búsqueda y salvamento a encontrar víctimas de ahogamiento con robots acuáticos operados remotamente. También para explorar áreas de desastre
diseñan una estrategia basada en entropía que permite evaluar las fronteras de la parte conocida de un mapa.
exploran el papel de la tecnología de la información en la gestión de desastres y la resiliencia, concluyen tienen roles potenciales en la prevención y preparación antes de que ocurran desastres, y en las fases de recuperación y respuesta e identifica tecnologías importantes como los macrodatos, el sistema de información global, la inteligencia artificial, el Internet de las cosas (IoT), los drones y la robótica avanzada que pueden ayudar en la gestión de desastres.
3.2. Salud
Como respuesta a la pandemia derivada del coronavirus,
diseñaron un ventilador robótico portátil con la ayuda de las últimas tecnologías accesibles.
proponen un sistema programable seguro y eficiente que utiliza un robot humanoide capaz de moverse y detectar supervivientes de forma autónoma en escenarios de emergencia, con potencial para comunicarse verbalmente con las víctimas de Covid.
capacitan a un agente móvil utilizando informes de tomografía computarizada (TC) y rayos X bajo aprendizaje profundo mediante una red VGG-16 para clasificar pacientes COVID y no COVID y brindar recomendaciones a la víctima sobre verse afectado por la enfermedad.
En
para el cáncer de pulmón en la vejez se realizó un esquema de clasificación mediante el estudio de micrografías en una red neuronal profunda utilizando un marco de aprendizaje automático para diagnóstico médico. Con el fin de atender las necesidades de los pacientes tras un accidente cerebrovascular con afectaciones en sus extremidades superiores,
diseñan un exoesqueleto de mano portátil impreso en 3D controlado por electromiografía para mejorar la capacidad de agarre de la mano.
presentan un dispositivo de asistencia manual compacto para ayudar a realizar actividades de la vida diaria.
proponen un guante inteligente o una mano robótica para medir y mejorar la movilidad y el rango de movimiento de la mano con parálisis.
mediante un robot exoesqueleto de 7 grados de libertad, con una dinámica incierta no lineal y perturbaciones externas limitadas desconocidas debido a las condiciones fisiológicas del usuario, buscan ayudar con control pasivo, activo o asistencial para proporcionar asistencia física y rehabilitación.
También para pacientes víctimas de accidente cerebrovascular con afectaciones en sus extremidades inferiores
señalan que imágenes motoras más interfaces cerebro-computadora podrían utilizarse para la comunicación, y para el control de sillas de ruedas, brazos robóticos y otros equipos médicos, así como ortesis y prótesis, como resultado tienen la señal EEG de imágenes motoras clasificada.
comparten su diseño conceptual de un traje de exoesqueleto que permite pasar de la posición sentada a la de pie y viceversa, muy versátil para problemas de movilidad reducida.
diseñaron un coche robótico que se puede controlar con movimientos oculares.
hacen un análisis biomecánico y dinámico de la marcha humana para diseñar exoesqueletos para rehabilitación, brindar mejores condiciones de vida y reintegración a la sociedad a personas con pérdida parcial o total de la marcha por lesión de la médula espinal.
En el contexto de la terapia asistida por robot para recuperar las capacidades motoras de las víctimas de accidentes cerebrovasculares,
proponen un algoritmo de simulación para realizar análisis, evaluación y desarrollo de controles de interacción humana aplicados a la neuro-rehabilitación robótica.
proponen el uso de la terapia asistida por robot basada también en electromiografía para mejorar y evaluar el control del movimiento en entornos clínicos y así mejorar la recuperación sensorial y motora.
diseñan una estructura robótica paralela de 5 grados de libertad para ayudar en el proceso de rehabilitación de la marcha, que funciona como un soporte activo del peso corporal para ejercicios en cinta rodante o sobre el suelo. Y
diseñaron una herramienta autocontrolable de rehabilitación del codo.
Para la identificación y respuesta a emergencias
proponen un sistema robótico inteligente basado en IoT y aprendizaje profundo para ayudar a las personas que estén solas en casa para detectar anomalías y prestar primeros auxilios y/o llamar a contactos de emergencia en un tiempo mínimo; el sistema detecta la angustia mediante gritos audibles y monitoreo frecuente de su entorno, una vez que detecta una situación trágica, intenta detectar a la persona en el marco de su cámara, luego, la busca e intenta obtener comentarios de ella y proporcionar un remedio adecuado a la víctima, si la víctima está inconsciente, contacta a los servicios de emergencia.
crean un sistema de rescate y primeros auxilios basado en drones en los Servicios Médicos de Emergencia orientados a las emergencias sanitarias, los objetivos son mejorar el tiempo de respuesta, evaluar la salud de la víctima, ayudar en la administración de primeros auxilios, transmitir en vivo en tiempo real los signos vitales de la víctima a los socorristas y, principalmente, describir cómo se puede lograr la sostenibilidad en la atención médica.
puntualizan en los robots de rescate que registran grandes cantidades de imágenes, por lo que una rápida visión general basada en estos datos puede ayudar al personal médico a buscar estrategias de tratamiento adecuadas tras el rescate.
La unidad robótica (SkinFactory) creada por
para la bioimpresión en 3D de piel dermoepidérmica pigmentada y prevascularizada, permite el desarrollo utilizando fibroblastos, células endoteliales sanguíneas y linfáticas, queratinocitos y melanocitos derivados de piel humana, ellos se usan como sustitutos de la piel humana para tratar grandes defectos como quemaduras graves.
Para ayudar a realizar ejercicios de fisioterapia en casa después de un accidente automovilístico
diseñaron una aplicación interactiva basada en visión por computadora que, con estimación de postura, apoya a los terapeutas brindándoles métricas en tiempo real, permitiendo que los pacientes sean evaluados adecuadamente a través de atención remota.
Finalmente,
diseñaron una plataforma tecnológica que ofrece atención médica y telequirúrgica en entornos remotos y austeros de la Luna, Marte y la Tierra, este sistema podrá proporcionar capacitación médica, búsqueda y rescate, clasificación médica e intervenciones quirúrgicas en tiempo real.
Hasta aquí y de forma general, las aplicaciones fueron clasificadas para la atención de víctimas de desastres o con afectaciones en su salud. Dentro de los desastres se encuentran aplicaciones específicas para atención de terremotos, avalanchas, incendios, ahogamientos, caídas en pozos y aplicaciones para desastres en general. A nivel de salud existen aplicaciones para la atención del COVID-19, cáncer de pulmón, accidentes cerebrovasculares, emergencias, quemaduras y fisioterapia.
4. DISCUSIÓN
En la Fig. 10, se destaca que el tipo de documento más prevalente trata sobre desastres abarcando un total de 53 documentos mientras que hay 22 documentos relacionados con el apoyo a la atención a enfermedades.
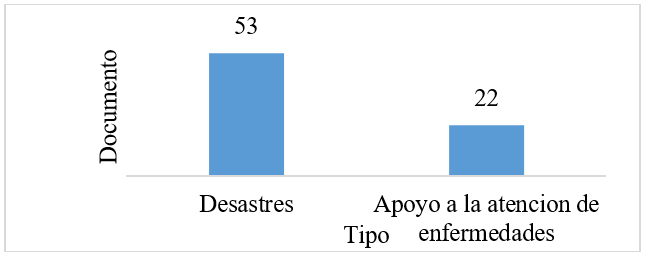
Fig. 10. Temática de los documentos estudiados.
Fuente: elaboración propia.
La mayoría de las aplicaciones se presentan para actividades de visualización de escenarios para la identificación de víctimas en diferentes contextos de desastre, enfermedad y accidente, algunos robots entregan materiales y hacen diagnósticos mientras el personal de rescate da respuesta.
Se observa una tendencia en el trabajo colaborativo a todo nivel, ya sea entre robots y personal de rescate, o entre robots. Así como entre diferentes tecnologías de trabajo en grupo entre robots donde se destaca el tipo enjambre, con robots diferentes que desempeñan distintos roles que pueden ser autónomos o teleoperados. La robótica cooperativa permite sacar mayor provecho de las ventajas y compensar las desventajas de los distintos elementos que participan en su ejecución.
En general se observa que no es posible sustituir el rescate humano por un rescate netamente robótico, por el contrario, la labor de los humanos se fortalece, agiliza y se hace más segura, pero la atención a las víctimas de los desastres requiere de personal experto para atender a las particularidades de cada una de las víctimas.
Como efecto de contar con información en tiempo real de las características de los entornos en donde se presenta cada desastre se reduce la incertidumbre, esto permite planear mejor la forma de reacción disminuyendo el riesgo de las personas que atienden a las víctimas y de las víctimas en sí.
La atención de víctimas de desastres se da en condiciones de entorno complicadas como la falta de luz, la presencia de gases, escombros, ruido, superficies inestables e incluso diversas condiciones climáticas que dificultan la actuación tanto de humanos como de robots y constituyen un reto de investigación permanente, la reducción del tiempo de respuesta puede representar la diferencia entre la vida y la muerte de personas, por lo que se pronostica como una línea de investigación con desarrollos permanentes.
Existen avances importantes en algoritmos para la planeación de rutas aplicables tanto a robots como a personas no solo para el ingreso a las zonas de desastre, sino también para la salida con y sin víctimas.
Actualmente se están desarrollando robots de rescate con funciones que incluyen encontrar, mapear, limpiar escombros, entregar suministros, compartir información en tiempo real, brindar primeros auxilios y evacuar víctimas, estos desarrollos de robots de búsqueda y rescate podrían usarse con otros fines asistenciales.
A nivel de aplicaciones en salud, se observa los avances en robótica para la atención y rehabilitación de pacientes con importantes dificultades de movilidad derivadas de haber sufrido accidentes cerebrovasculares. Estos avances pueden ser aplicables a la población víctima de la violencia que ha visto reducida su capacidad de movilidad en sus miembros tanto inferiores como superiores por la exposición a las minas enterradas en las superficies en las zonas más alejadas del país donde persiste el conflicto y la presencia de organizaciones al margen de la ley.
Se evidencia el uso de algoritmos de reconocimiento de patrones como redes neuronales y de aprendizaje profundo, que potencializan las facultades de un agente robótico para el reconocimiento de víctimas, problemas de salud y/o ejecución de tareas.
5. CONCLUSIONES
Con relación directa a secuelas de la violencia los resultados muestran la ausencia de publicaciones científicas en la base de datos Scopus, por lo que se concluye que no hay avances a nivel de robótica para atender específicamente a la población que ha sido víctima de la violencia, o al menos los avances existentes no han sido documentados a nivel científico. Sin embargo, se logra evidenciar que es posible que los avances existentes en robótica asistencial puedan resultar útiles para atender a la población víctima de la violencia por lo que su análisis se propone como investigación futura.
De otro lado las redes bibliográficas muestran la casi inexistencia de trabajo de coautoría entre autores, poco entre organizaciones y países, tampoco a nivel de citaciones se conforman redes, por lo que se sugiere promover el trabajo colaborativo en la búsqueda de resultados que tengan mayor impacto y posibilidad de divulgación.
Las condiciones particulares de Colombia, hacen se requiera investigar en robótica asistencial, para atender víctimas del conflicto que se siguen presentado a pesar de estar en una etapa de posacuerdo, estos avances no son excluyentes y podrían favorecer a otras personas en situación de discapacidad física, también puede apoyarse en los avances logrados para la atención de desastres y salud relacionados en el presente documento.
RECONOCIMIENTO
Producto derivado del proyecto de investigación código IMP-ING-3405 titulado "Prototipo robótico móvil para tareas asistenciales en entornos residenciales" financiado por la vicerrectoría de investigaciones de la Universidad Militar Nueva Granada.
REFERENCIAS
[1] Barrientos, Peñin, Balaguer y Aracil, Fundamentos de Robótica, Madrid: McGraw-Hill, 1997.
[2] Y. Dussán, «Colombian Military Hospital Expands Prosthesis Program,» 01 marzo 2017. [En línea]. Available: https://dialogo-americas.com/articles/colombian-military-hospital-expands-prosthesis-program/.
[3] Hossin, Chen, Asante, Boadi y Adu-Yeboah, «Climate change and COP26: role of information technologies in disaster management and resilience,» 2023.
[4] Page, McKenziea, Boutron, Hoffmann, Mulrow, Shamseer, Tetzlaf, Akl, Brennan, Chou, Glanville, Grimshaw, ´bjartsson, Lalu, LTianjing, Elizabeth, Mayo-Wilson, McDonald, McGuinness, Stewart, Thomas, Tricco, Welch, Whiting y Moher, «Declaracion PRISMA 2020: una guıa actualizada para la publicacion de revisiones sistematicas,» pp. 790 - 799, 2021.
[5] Cruz, Sánchez, Prieto, Barrientos y Cerro, «Autonomous thermal vision robotic system for victims recognition in search and rescue missions,» Sensors, vol. 21, 2021.
[6] He, Wu, Yang y Chen, «The scheme of mine search multifunctional robot based on the inertial navigation,» de The scheme of mine search multifunctional robot based on the inertial navigation, Tianjin, 2022.
[7] Narayan, Aquif, Kalim, Chagarlamudi y H. Vignesh, «Search and Reconnaissance Robot for Disaster Management,» Mandi, 2022.
[8] Cruz, Garrido, Cerro y Barrientos, «Autonomous victim detection system based on deep learning and multispectral imagery,» Machine Learning: Science and Technology, vol. 4.
[9] Ristmae, Koutsokeras, Ouzounoglou, Fotopoulos, Linardatos, Lappas, Tsogas, Kostaridis, Steinhäusler, Dionysiou, Douklias, Amditis, Diles, Smanis, Moutzouris, Segura, Diagourtas, Ozawa y Watanabe, «The CURSOR Search and Rescue (SaR) Kit: An innovative solution for improving the efficiency of Urban SaR Operations,» Blacksburg, 2021.
[10] Cacace, Mimmo y Marconi, «An ARVA Sensor Simulator,» de Studies in Computational Intelligence, Springer Science and Business Media Deutschland GmbH, 2021, pp. 233 - 266.
[11] Suresh, Rhythesh, Dinesh, Deepak y Manikandan, «An Arduino Uno Controlled Fire Fighting Robot for Fires in Enclosed Spaces,» Dharan, 2022.
[12] S. Gelfert, «A sensor review for human detection with robotic systems in regular and smoky environments,» A sensor review for human detection with robotic systems in regular and smoky environments, 2023.
[13] Couceiro, Portugal, Rocha y Araújo, «Fostering human–robot cooperative architectures for search and rescue missions in urban fires,» Simulation, vol. 97, pp. 177 - 194, 2021.
[14] Talavera, Roldán-Gómez, Martín y Rodriguez-Sanchez, «An autonomous ground robot to support firefighters' interventions in indoor emergencies,» Journal of Field Robotics, vol. 40, pp. 614 - 625, 2023.
[15] Rishab, Thinoj y Prabhu, «Mechatronic Puppet Based Robotic Hand System For Life Saving Application,» de Proceedings of the 9th International Conference on Electrical Energy Systems, ICEES 2023, Chennai, 2023.
[16] Saputra, Rakicevic, Kuder, Bilsdorfer, Gough, Dakin, d. Cocker, Rock, Harpin y Kormushev, «Resqbot 2.0: An improved design of a mobile rescue robot with an inflatable neck securing device for safe casualty extraction,» Applied Sciences (Switzerland), vol. 11, 2021.
[17] Cruz, Garcia, Cerro y Barrientos, «Deep Learning for Victims Detection from Virtual and Real Search and Rescue Environments,» de Lecture Notes in Networks and Systems, Zaragoza, 2023.
[18] Cruz, Cerro y Barrientos, «Mixed-reality for quadruped-robotic guidance in SAR tasks,» Journal of Computational Design and Engineering, vol. 10, pp. 1479 - 1489, 2023.
[19] Cruz, Llerena, Barrientos y Cerro, «Autonomous 3D Thermal Mapping of Disaster Environments for Victims Detection,» de Studies in Computational Intelligence, vol. 1051, Institute of Electrical and Electronics Engineers Inc., 2023, pp. 83 - 117.
[20] Bomfim, Lima, Monteiro y Sena, «A new approach for hybrid (PID + MRAC) adaptive controller applied to two-axes McKibben muscle manipulator: a mechanism for human-robot collaboration,» Industrial Robot, vol. 48, pp. 836 - 845, 2021.
[21] Lemana, Thamrin, Utami, Pamungkas, Pebrinaldi y Mandalika, «Mobile Robot Detecting Temperature and Humidity for Environment Disaster with Arduino UNO Platform,» de AIP Conference Proceedings, Hybrid, Palembang, 2023.
[22] Van, Thanh, Khang, An y Nhat, «A Mobile Robotic System for Rescue and Surveillance in Indoor Environment,» de EAI/Springer Innovations in Communication and Computing, 2022.
[23] Watanabe, Ozawa, Takahashi, Kimura, Tadakuma, Marafioti y Tadokoro, «Design of a Sustainable Rescue and First Aid Drone-Based System for Passenger Car Occupants,» de Lecture Notes in Mechanical Engineering, Sevilla, 2023.
[24] Chuttur y Rungen, «Design and Implementation of an Autonomous Wheeled Robot Using IoT with Human Recognition Capability,» de Proceedings - 2022 3rd International Conference on Computation, Automation and Knowledge Management, ICCAKM 2022, Dubai, 2022.
[25] Anjum, Samo, Nighat, Nisa, Soomro y Alayi, «Design and Modeling of 9 Degrees of Freedom Redundant Robotic Manipulator,» Journal of Robotics and Control (JRC), vol. 3, pp. 800 - 808, 2022.
[26] Megalingam, Vadivel, Rajendraprasad, Raj, Baskar y B. M. Babu, «Development and evaluation of a search-and-rescue robot Paripreksya 2.0 for WRS 2020,» Advanced Robotics, vol. 36, pp. 1120 - 1133, 2022.
[27] Arabboev, Begmatov, Nosirov, Shakhobiddinov, Chedjou y Kyamakya, «Development of a Prototype of a Search and Rescue Robot Equipped with Multiple Cameras,» de International Conference on Information Science and Communications Technologies: Applications, Trends and Opportunities, ICISCT 2021, Virtual, Tashkent, 2021.
[28] Tippannavar, Puneeth, Yashwanth, Sudan, Murthy y Prasad, «SR2-Search and Rescue Robot for saving dangered civilians at Hazardous areas,» de Proceedings of 2nd IEEE International Conference on Disruptive Technologies for Multi-Disciplinary Research and Applications, CENTCON 2022, Bengaluru, 2022.
[29] Pastor, Ruiz-Ruiz, Gomez-De-Gabriel y Garcia-Cerezo, «Autonomous Wristband Placement in a Moving Hand for Victims in Search and Rescue Scenarios With a Mobile Manipulator,» IEEE Robotics and Automation Letters, vol. 7, pp. 11871 - 11878, 2022.
[30] Mimmo, Bernard y Marconi, «Avalanche Victim Search via Robust Observers,» vol. 29, pp. 1450 - 1461, 2021.
[31] Byukusenge y Zhang, «Life Detection Based on UAVs - Thermal Images in Search and Rescue Operation,» de International Conference on Communication Technology Proceedings, ICCT, Virtual, Online, 2022.
[32] Chaudhary, Yadav, Sharma, Rouf y Gupta, «RF Controlled Solar Based Robotic Drone,» de 2021 International Conference on Advance Computing and Innovative Technologies in Engineering, ICACITE 2021, Greater Noida, 2021.
[33] Mansor, Norhisam, Abidin y Gunawan, «Autonomous surface vessel for search and rescue operation,» Bulletin of Electrical Engineering and Informatics, vol. 10, pp. 1701 - 1708.
[34] Ramirez, Medina-Soto, Dirksen, Victoriano y Bhandari, «UAV Platforms for Autonomous Navigation in GPS-Denied Environments for Search and Rescue Missions,» de 2022 International Conference on Unmanned Aircraft Systems, ICUAS 2022, Dubrovnik, 2022.
[35] Gumar, Albaker y Al-Turfi, «Unmanned Ground Vehicle Prototype Development for Search Evacuation and Defense Based on IoRT,» de Lecture Notes in Networks and Systems, Ghaziabad, 2022.
[36] Sandino, Maire, Caccetta, Sanderson y Gonzalez, «Drone-based autonomous motion planning system for outdoor environments under object detection uncertainty,» Remote Sensing, vol. 13, 2021.
[37] Pham, Ugurlu, Fevre, Bardakci y Kayacan, «Deep learning for vision-based navigation in autonomous drone racing,» de Deep Learning for Robot Perception and Cognition, Elsevier, 2022, pp. 371 - 406.
[38] Berdibayeva, Bodin, Ozhikenov y Berdibayev, «Bionic Method for Controlling Robotic Mechanisms during Search and Rescue Operations,» International Journal of Mechanical Engineering and Robotics Research, vol. 10, pp. 128 - 136, 2021.
[39] Petrenko, Tebueva, Antonov, Ryabtsev, Sakolchik y Satybaldina., «Evaluation of the iterative method of task distribution in a swarm of unmanned aerial vehicles in a clustered field of targets,» Journal of King Saud University - Computer and Information Sciences, vol. 35, pp. 283 - 291, 2023.
[40] Szuba, «Invisible Hand as a New Control Paradigm for the Future Collectively Intelligent Social Structures of Quasi-Intelligent Robotics,» Springer Science and Business Media Deutschland GmbH, 2022, pp. 267-293.
[41] Seenu, Ramanathan y Ramya, «Autonomous Multiple Robots Exploration using Evolutionary Optimization Algorithm,» de 3rd International Conference on Electronics and Sustainable Communication Systems, ICESC 2022 - Proceedings, Coimbatore, 2022.
[42] Orbea, Cruz, Cerro y Barrientos, «RUDE-AL: Roped UGV Deployment Algorithm of an MCDPR for Sinkhole Exploration,» Sensors, vol. 23, 2023.
[43] Gomez, Pena, Rincon, Amaya y Calderon, «Leader-follower Behavior in Multi-agent Systems for Search and Rescue Based on PSO Approach,» Mobile, 2022.
[44] Garcia, Leithardt y Villarrubia, «Urban search and rescue with anti-pheromone robot swarm architecture,» 2021 Telecoms Conference, ConfTELE 2021, 2021.
[45] Li, Chen y Chen, «Analyzing Tracked Search and Rescue Robots,» de Proceedings of SPIE - The International Society for Optical Engineering, Chengdu, 2022.
[46] Bravo-Arrabal, Toscano-Moreno, Fernandez-Lozano, Mandow, Gomez-Ruiz y García-Cerezo, «The internet of cooperative agents architecture (X-ioca) for robots, hybrid sensor networks, and mec centers in complex environments: A search and rescue case study,» Sensors, vol. 21, 2021.
[47] Roy, Maitra y Bhattacharya, «Exploration of Multiple Unknown Areas by Swarm of Robots Utilizing Virtual-Region-Based Splitting and Merging Technique,» IEEE Transactions on Automation Science and Engineering, vol. 19, pp. 3459 - 3470, 2022.
[48] Paez, Romero, Noriega, Cardona y Calderon, «Distributed particle swarm optimization for multi-robot system in search and rescue operations,» de IFAC-PapersOnLine, Elsevier B.V., 2021.
[49] Robbiani, Marafioti, Ozawa, Watanabe, Takahashi y Tadokoro, «SMURF software architecture for low power mobile robots: experience in search and rescue operations,» de SSRR 2022 - IEEE International Symposium on Safety, Security, and Rescue Robotics, Sevilla, 2022.
[50] Bououden, Brahmi, Rahman y Saad, «Flatness tracking control scheme of rehabilitation exoskeleton robot with dynamic uncertainties,» vol. 236, pp. 1845 - 1864, 2022.
[51] Smith, Mukhopadhyay, Murphy, Manzini y Rodriguez, «Path Coverage Optimization for USV with Side Scan Sonar for Victim Recovery,» de SSRR 2022 - IEEE International Symposium on Safety, Security, and Rescue Robotics, Sevilla, 2022.
[52] Herlambang, Rahmalia, Nurhadi, Suryowinoto y Muhith, «Estimation of Remote Operated Vehicle Motion in XY Plane using Unscented Kalman Filter,» de AIP Conference Proceedings, Jember, 2023.
[53] Godoy-Calvo, Lin-Yang, Vázquez-Martín y García-Cerezo, «Dynamic entropy-based method for exploring frontiers in unknown environments; [Exploración dinámica de fronteras en entornos desconocidos basada en la entropía],» RIAI - Revista Iberoamericana de Automatica e Informatica Industrial, vol. 20, pp. 213 - 223, 2023.
[54] Kosalendra, Krishnamoorthi, Diwakaran, Vijayakumari y Kuppusamy, «Experimental Design of a Robotic Ventilator to Support Covid-19 and Related Pandemic Situations,» de Proceedings of 8th IEEE International Conference on Science, Technology, Engineering and Mathematics, ICONSTEM 2023, Chennai, 2023.
[55] Angelopoulos, Baras y Dasygenis, «Secure autonomous cloud brained humanoid robot assisting rescuers in hazardous environments,» de Electronics (Switzerland), 2021.
[56] Al-Shammari, Almansour, Basha y Ahmed, «Tele-robotic recommendation framework using multi-dimensional medical datasets on COVID-19 classification,» International Journal of Advanced and Applied Sciences, vol. 9, pp. 152 - 159, 2022.
[57] Rastogi, Chaturvedi, Sagar, Tandon y Rastogi, «Risk Stratification for Subjects Suffering from Lung Carcinoma: Healthcare 4.0 Approach with Medical Diagnosis Using Computational Intelligence,» de EAI/Springer Innovations in Communication and Computing, Springer Science and Business Media Deutschland GmbH, 2022, pp. 171 - 193.
[58] Abdallah y Bouteraa, «A Newly-Designed Wearable Robotic Hand Exoskeleton Controlled by EMG Signals and ROS Embedded Systems,» Robotics, vol. 12, 2023.
[59] Alnajjar, Umari, Ahmed, Gochoo, Vogan, Aljumaily, Mohamad y Shimoda, «CHAD: Compact Hand-Assistive Device for enhancement of function in hand impairments[Formula presented],» Robotics and Autonomous Systems, vol. 142, 2021.
[60] Vigneshwari, Kabilan, M. Balaji, Srinivasan, Bhavadharani y Sushmitha, «Design of Smart Glove to Monitor the Restorative Actions of Paretic,» de 2023 4th International Conference for Emerging Technology, INCET 2023, Belgaum, 2023.
[61] Bhadoriya, Montez, Rathinam, Darbha, Casbeer y Manyam, «Optimal Path Planning for a Convoy-Support Vehicle Pair Through a Repairable Network,» IEEE Transactions on Automation Science and Engineering, pp. 1 - 12, 2023.
[62] Mandal y B. Naskar, «Improved Black Widow Optimization Assisted Channel Selection for Motor Imagery BCI:A Non-Parametric Analysis,» de 2022 International Conference on Smart Generation Computing, Communication and Networking, SMART GENCON 2022, Bangalore, 2022.
[63] Hamid, b. Mohd y M. Zakaria, «Conceptual Design and FEM Analysis of an Exoskeleton Suit for Post-stroke Patient: A Lower Limbs Exo Suit,» de IFMBE Proceedings, Okayama, 2021.
[64] Amareswar, Naik, Prasad, Chandra y Karthik, «Design of Brain Controlled Robotic Car using Raspberry Pi,» de Proceedings of the 5th International Conference on Trends in Electronics and Informatics, ICOEI 2021, Tirunelveli, Tamilnadu, 2021.
[65] Zorkot, Vieira y Brasil, «Modeling and Analysis of Human Jump Dynamics for Future Application in Exoskeletons,» Vitória, 2022.
[66] Mosconi y Siqueira, «Development of a Flexible Algorithm for Simulations with Human-Exoskeleton Models: An Approach to the Robot-Assisted Therapy,» de IFMBE Proceedings, Florianópolis, 2024.
[67] Amin, Waris, Iqbal, Gilani, U. Rehman, Mushtaq, Khan, Khan, Jameel y Tamam, «Maximizing stroke recovery with advanced technologies: A comprehensive assessment of robot-assisted, EMG-Controlled robotics, virtual reality, and mirror therapy interventions,» Results in Engineering, vol. 21, 2024.
[68] Rodrigues y Gonçalves, «Development of a Parallel Robotic Body Weight Support for Human Gait Rehabilitation,» de IFMBE Proceedings, Vitória, 2022.
[69] Xun, Ang y Yeow, «Elbow Soft Robot Rehabilitation System for Hemiplegic Stroke Patients Based on sEMG Control,» de 2023 IEEE International Conference on Soft Robotics, RoboSoft 2023, Singapore, 2023.
[70] Dias, Aloj, Ninan, Koshti y Kamoji, «First Aid and Emergency Assistance Robot for Individuals at Home using IoT and Deep Learning,» de Proceedings - 7th International Conference on Computing Methodologies and Communication, ICCMC 2023, Erode, 2023.
[71] Moyo, Mushiri y Noorbhai, «Design of a Sustainable Rescue and First Aid Drone-Based System for Passenger Car Occupants,» de Lecture Notes in Mechanical Engineering, Berlin, 2023.
[72] Kriebisch, Bruder y Ernst, «Generation of 3D models of victims within their surroundings at rescue sites,» Current Directions in Biomedical Engineering, vol. 9, pp. 634 - 637, 2023.
[73] Pontiggia, Hengel, Klar, Rütsche, Scheidegger, Figi, Reichmann, Moehrlen y Biedermann, «Bioprinting and plastic compression of large pigmented and vascularized human dermo-epidermal skin substitutes by means of a new robotic platform,» Journal of Tissue Engineering, vol. 13, 2022.
[74] Tannoury, Chouem y Darazi, «Human pose estimation for physiotherapy following a car accident using depth-wise separable convolutional neural networks,» Advances in Transportation Studies, vol. 59, pp. 165 - 178, 2023.
[75] Jewell, Jewell, Pack y Velasco, «The medinauttm system: a telerobotic, tele-presence flying telesurgical physician drone-rover offering real time, remote relief and medical care for austere isolated environments on earth and astronauts on a planetary surface,» de Proceedings of the International Astronautical Congress, IAC, Paris, 2022.
 1,
PhD. Robinson Jiménez Moreno
1,
PhD. Robinson Jiménez Moreno