Estudio técnico comparativo de levantamientos topográficos en terreno montañoso realizados con estación total, equipos GNSS, y UAV de consumo con y sin apoyo de puntos de control
Comparative technical study of topographic surveys in mountainous areas carried out with total station, GNSS equipment, and non-specialized UAV with and without control point support
Resumen: El objetivo del presente trabajo es realizar una comparación de tres tecnologías topográficas usadas comúnmente en el mapeo de terrenos montañosos: estación total, equipos GNSS y UAV de consumo. En esta comparación tomamos en cuenta criterios cronológicos, y técnicos para determinar las ventajas y desventajas de cada una de las tecnologías analizadas. En este estudio se determinó que las antenas GNSS, siempre y cuando cuenten con recepción satelital y una comunicación entre base y rover óptimas, ofrecen el mejor desempeño comparadas con las otras dos. Estas obtuvieron una precisión similar a la conseguida con estación total, con tiempos de ejecución considerablemente menores. En segundo lugar, se encontró que los datos recolectados con UAV, con puntos de control, permitieron realizar una descripción geomorfológica de la zona cuya precisión es sensiblemente inferior a la conseguida con las otras dos tecnologías analizadas. Esto evidenció que, para conseguir mayor precisión, es necesario realizar una alta densificación de puntos de control, aun cuando esto suponga un aumento de los tiempos de trabajo en campo.
Palabras clave: topografía con drones, altimetría, líneas de contorno, modelo digital de elevación “MDE”, navegación cinética satelital en tiempo real “RTK”.
Abstract: This study compares three commonly used topographic technologies for mapping mountainous terrain: total station, GNSS equipment, and non-specialized UAV (with and without control points). The comparison considered chronological and technical criteria to determine the advantages and disadvantages of each technology. The study found that GNSS antennas, when they have optimal satellite reception and communication between the base and rover, offer the best performance compared to the other survey methods. They achieved accuracy similar to that of a total station, with considerably shorter execution times. Another finding was that the data collected with a UAV using control points allowed for a geomorphological description of the area but with significantly lower accuracy than the other technologies. These results emphasize the importance of performing a high densification of control points to achieve greater accuracy, even if it means increasing the required fieldwork time.
Keywords: drone surveying, altimetry topographic survey, contour lines, digital elevation model "MDE", real-time kinematic "RTK".
1. INTRODUCCIÓN
El uso de los sistemas de navegación global por satélite (GNSS) y los vehículos aéreos no tripulados (UAV)
han experimentado un aumento significativo en los últimos años, marcando un cambio sustancial en el campo de la topografía. Estos avances tecnológicos, aunque relativamente nuevos, han ganado terreno rápidamente, ofreciendo grandes ventajas respecto a la estación total. Sin embargo, la estación total, que es una combinación de un teodolito y un distanciómetro electrónicos
, sigue siendo el instrumento más extendido en topografía, sobre todo en aplicaciones que exigen la máxima precisión posible.
Aunque la estación total es considerada como el equipo insignia en el campo de la topografía, dada su confiabilidad y precisión, esta tecnología presenta dos principales desventajas. En primer lugar, dada la necesidad de tener siempre visual entre el punto de armado y los puntos a tomar, los tiempos y costos del levantamiento son relativamente altos. En segundo lugar, en algunos casos, la dificultad de acceso a las zonas del terreno donde deben tomarse los puntos del levantamiento puede suponer un riesgo para los integrantes de la comisión o simplemente hacer imposible el obtener la información de esa zona. Por otro lado, los obstáculos en el terreno, como árboles, vegetación alta, líneas eléctricas, áreas montañosas, o una climatología desfavorable, pueden provocar una degradación de los datos obtenidos con GNSS y UAV
. En este sentido Khudur y Yaseen señalan que en las mediciones tomadas con equipos GNSS pueden verse afectadas por la distancia disminuyendo la precisión a medida que esta aumenta
.
Los sistemas globales de navegación por satélite (GNSS) utilizan una red de satélites para proporcionar posicionamiento geolocalizado, el sistema más conocido es el sistema GPS administrado por el ejército norteamericano, aunque también existen otros sistemas de navegación como el sistema Galileo (Unión Europea), Glonass (Rusia), Beidou (China) entre otros
. Por otro lado, los receptores GNSS permiten determinar la geo ubicación a partir de las señales de la red de satélites. Este estudio se centrará en los receptores GNSS para topografía, estas antenas poseen un receptor de alta precisión, que puede llegar a obtener mediciones por debajo del centímetro. A esta tecnología se asocian diversos métodos de posicionamiento como NTRIP o RTK. En este estudio, utilizamos el método cinemático en tiempo real (RTK), para lograr la mayor precisión de posicionamiento, se usaron simultáneamente los sistemas de constelaciones GPS, Galileo, GLONASS y Beidou. En última instancia, la mayor precisión de posicionamiento en RTK se consigue combinando varios sistemas al tiempo
.
En su estudio sobre precisión de fotogrametría con UAV, Ferrer Gonzales et al. señalan la importancia de insumos fotogramétricos, tales como como los ortomosaicos y los modelos digitales de superficie o elevación, para describir la morfología del terreno
. Dadas estas necesidades, la introducción de los UAV en el ámbito de la topografía ha sido un evento transformador, al convertirse en una opción para la captura de imágenes con fines fotogramétricos a bajo coste. En la actualidad no solo los UAV especializados de ala fija o multirrotores con cámaras profesionales y sensores GNSS submétricos con tecnología RTK son usados para realizar fotogrametría, los drones de consumo general también han irrumpido en este campo
. Los UAV de consumo les han permitido a pequeñas empresas o topógrafos independientes acceder a estos insumos fotogramétricos.
No obstante, es necesario determinar los niveles de precisión que pueden alcanzar los productos fotogramétricos obtenidos con estos equipos en terrenos con unos altos desniveles de altura y constantes cambios de pendiente. Uno de los métodos para aumentar la precisión absoluta y relativa de los productos fotogramétricos es el establecimiento de puntos de control aéreo georreferenciados con equipos topográficos de precisión
, los cuales son marcados en terreno de manera tal que puedan ser identificables en el procesamiento de las imágenes. Dado que usar puntos de control aumenta considerablemente el tiempo requerido para la ejecución de los trabajos en campo, pero al mismo tiempo dicho método permite obtener una mayor precisión, en este estudio se decidió introducir esta variable. Así pues, en este análisis se considera las ventajas y desventajas asociadas con el uso o no de puntos de control cuando se utiliza la tecnología UAV.
Conocer la precisión aportada, así como los tiempos requeridos para realizar la caracterización topográfica en una zona montañosa es importante ya que aporta una pauta objetiva de cuál es el método más idóneo según las necesidades estipuladas. No obstante, en la literatura no existe un estudio sistemático de estas tres tecnologías, pues los estudios disponibles o bien solo comparan dos tecnologías, o no lo hacen sobre las condiciones geográficas que ofrecen los terrenos montañosos
. De este modo, en este trabajo de investigación se buscó responder este vacío de la literatura al realizar un análisis comparativo en los apartados técnicos y cronológicos entre el sistema tradicional (estación total), antenas GNSS de topografía y UAV de consumo.
2. METODOLOGÍA
En esta sección se hace un recuento de las condiciones bajo las cuales se realizó el presente estudio. De este modo, se describe la zona de estudio que se ha tomado como objeto de medición, así como las herramientas técnicas, tecnologías topográficas, y de procesamiento y análisis de datos que se usaron para llevar a cabo este estudio.
2.1. Área de Estudio
Para esta investigación, se decidió realizar un análisis topográfico de un mismo terreno con tres tecnologías diferentes. El terreno elegido para esta labor está ubicado en el casco urbano del municipio de Neira Caldas (Colombia), el cual cuenta con un área de 39.900 m² con una altura que va desde los 1780 hasta los 1882 m.s.n.m. Este terreno fue escogido porque presenta una topografía especialmente montañosa, tal y como es característico en la zona andina del centro de Colombia.
2.2. Equipos
En este estudio los equipos usados para realizar la comparación entre las tres tecnologías analizadas fueron:
Estación total: Estación Trimble M3 DR, la cual cuenta con una precisión angular de 2”.
Receptores GNSS: Antenas GNSS de la marca Tersus, modelo Oscar Basic, multifrecuencia y multiconstelación. Una de las ventajas del método cinemático en tiempo real “RTK” es su rapidez a la hora capturar de información. Sin embargo, es imperativo que en todo momento haya conexión con la antena base, ya que esta es la que envía las correcciones necesarias para que el Rover pueda lograr la precisión requerida.
UAV: En este estudio se usó un UAV de consumo general de la casa Autel y referencia evo 2, con una cámara ½”, 48 megapíxeles y un receptor GNSS no especializado. Para la descripción del terreno, se realizó un plan de vuelo con una duración de 15 minutos donde se capturaron un total de 289 imágenes, tal y como se aprecia en la figura 1.
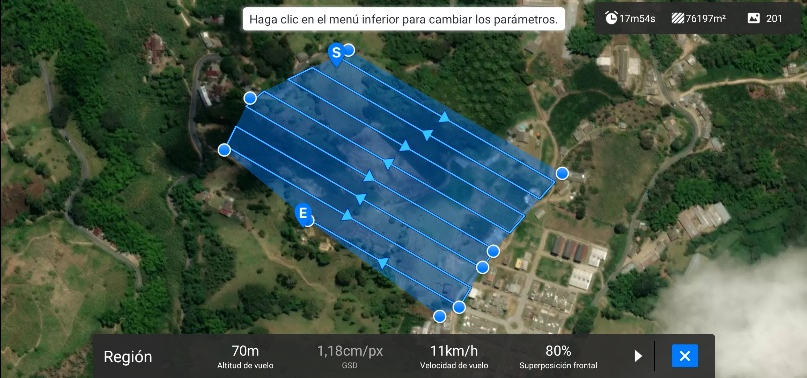
Fig. 1. Plan de vuelo.
Fuente: elaboración propia.
PC: El equipo usado para el trabajo de oficina fue un PC con un procesador AMD Ryzen 7 5800x, con 32GB de memoria RAM y una tarjeta gráfica Nvidia Geforce RTX3070.
2.3. Proyección Cartográfica
Para poder proyectar una superficie curva como la Tierra sobre un plano es necesario adoptar un sistema de proyección que permita convertir coordenadas geográficas que están expresadas angularmente (latitud y longitud) en coordenadas en un plano bidimensional con ejes X,Y (Este y Norte). En Colombia, desde el año 2020, la proyección oficial es la conocida como Origen Único. No obstante, para este estudio se tomó la proyección Magna Sirgas Origen Central, la cual es anterior al Origen Único
. Esta elección se debe a que esta última proyección posee un factor de escala de 1, mientras que el Nuevo Origen posee un factor de escala de 0.9992, lo cual puede producir distorsiones en el procesamiento fotogramétrico, así como en la toma de datos con las antenas GNSS. Dado que uno de los objetivos centrales de este trabajo es analizar la precisión de cada una de las tres tecnologías, se optó por usar aquel sistema de proyección que permitiera resultados tan precisos como fuera posible.
2.4. Puntos Topográficos Base
Para realizar las mediciones sobre el terreno elegido, se instalaron dos puntos topográficos base. Al primero, denominado GPS1, se le asignaron las coordenadas obtenidas por la antena GNSS base, la cual fue instalada en el punto usando la conexión a la red NTRIP del centro de control geodésico nacional. La fijación de este punto tuvo un tiempo de captura de 10 minutos y un error medio cuadrático de 0.075 metros en la componente horizontal y 0.123 metros en la vertical. Al segundo punto, denominado DTA1, se le asignaron las coordenadas usando la antena Rover por medio del método RTK. Este punto tuvo un error medio cuadrático en la componente horizontal (Eq1) de 0.009 metros y en la vertical (Eq2) de 0.028 metros.
\[
\mathrm{RMSE} = \sqrt{\frac{1}{n} \sum_{n-1}^{n} \frac{((x_i - x_{\mathrm{ref}})^2 + (y_i - y_{\mathrm{ref}})^2)}{2}} \hspace{1cm} (1)
\]
Donde:
xi y
yi son lecturas tomadas;
xref y
yref son los valores reales o de referencia;
n es el número de observaciones.
Por tanto,
(xi - xref)2 + (yi - yref)2
representa el error residual de la observación.
\[
\mathrm{VRMSE} = \sqrt{\frac{1}{n} \sum_{n-1}^{n} (z_i - z_{\mathrm{ref}})^2} \hspace{1cm} (2)
\]
Donde:
zi es cualquier lectura tomada;
zref y
yref son los valores reales o de referencia;
n es el número de observaciones.
Por tanto,
(zi - zref)2 representa el error residual de la observación.
A partir de estos dos puntos coordenados se fijaron los levantamientos con estación total, equipos GNSS y los puntos de control aéreos, tal y como se puede apreciar en la tabla 1.
Tabla 1: Puntos Topográficos Base
| Punto |
Norte |
Este |
Altura |
| GPS 1 |
1064563.999 |
839831.503 |
1881.122 |
| DTA1 |
1064549.182 |
839849.410 |
1881.116 |
Fuente: elaboración propia
2.5. Trabajo de Campo
Las labores en campo se realizaron durante tres días consecutivos. Durante el primer día se contó con un cielo despejado mientras que los días dos y tres el cielo estaba nublado. Durante los 3 días se tuvieron vientos fuertes, con ráfagas que alcanzaron los 40 km/h en algunos casos.
Una vez se georreferenciaron los dos puntos con los equipos GNSS, se procedió a armar la estación total en DTA1 y se dio línea a GPS1 para así orientar la estación total. A continuación, se realizó una poligonal con 5 deltas, tal y como se aprecia en la figura 2. Ahora, es preciso tener en cuenta que la diferencia de distancias entre los deltas se debió a la dificultad de obtener visual en algunos puntos, dados los desniveles del terreno.

Fig. 2. Poligonal.
Fuente: elaboración propia.
El error de cierre fue de 0.042m (Eq3), para una precisión de 1/9000 (Eq4).
\[
E_{\mathrm{cierre}} = \sqrt{(E_y)^2 + (E_x)^2} \hspace{1cm} (3)
\]
Donde:
Ey es el error en la componente Y y
Ex es el error en la componente X.
\[
\mathrm{Precisión} = \frac{E_{\mathrm{cierre}}}{\mathrm{Distancia\ poligonal}} \hspace{1cm} (4)
\]
2.6. Recolección de Información
Los puntos tomados en campo, referenciados con coordenadas Norte, Este y Altura, son la base para caracterizar el área que estudiamos. Para ello se creó una malla que cubrió toda la zona de estudio, prestando especial atención a los cambios de alturas, pendientes, quiebres y puntos de interés. A continuación, se describe el método usado para las mediciones realizadas con estación total y antenas GNSS. Es fundamental señalar que todos los puntos tomados se dividieron en tres grupos: los puntos de terreno, los puntos de control y los puntos de control aéreo.
2.6.1. Puntos del Terreno
En este grupo se encuentran los puntos usados para la caracterización del terreno. La finalidad de estos es crear una malla que cubra la zona de estudio prestando especial atención a los cambios de altura o pendiente. En este trabajo se tomaron 408 puntos.
2.6.2. Puntos de Control
Los puntos de control permitieron realizar una comparación puntual de los métodos estudiados. Estos puntos fueron marcados en terreno y georreferenciados con la estación total y las antenas GNSS. En total se tomaron 10 puntos de control, los cuales pueden ser consultados en la tabla 2 y visualizados en la figura 3. Ahora, es importante tener en cuenta que estos puntos no fueron incluidos a la hora de crear las superficies en el software AutoCAD Civil 3D (licencia educativa).
Tabla 2: Puntos de control
| Punto |
Norte |
Este |
Elevación |
| CTRL1 | 1064545.590 | 839833.535 | 1881.391 |
| CTRL2 | 1064556.667 | 839772.390 | 1850.264 |
| CTRL3 | 1064534.666 | 839694.294 | 1837.782 |
| CTRL4 | 1064563.307 | 839728.071 | 1837.472 |
| CTRL5 | 1064585.928 | 839689.994 | 1831.359 |
| CTRL6 | 1064598.032 | 839645.704 | 1820.271 |
| CTRL7 | 1064589.123 | 839873.554 | 1871.636 |
| CTRL8 | 1064513.791 | 839758.638 | 1860.973 |
| CTRL9 | 1064507.689 | 839815.690 | 1882.067 |
| CTRL10 | 1064451.462 | 839788.050 | 1869.692 |
Fuente: elaboración propia

Fig. 3. Puntos de control.
Fuente: elaboración propia.
2.6.3. Puntos de control aéreo
Estos puntos son necesarios para realizar un ajuste del mosaico durante el procesamiento fotogramétrico. En este estudio se tomaron 5 puntos de control aéreo, tal y como se aprecia en la tabla 3 y la figura 4.
Tabla 3: Puntos de Control Aéreo
| Punto |
Norte |
Este |
Elevación |
| 35 |
1064523.786 |
839817.402 |
1882.072 |
| 76 |
1064594.233 |
839849.307 |
1865.781 |
| 122 |
1064533.855 |
839701.778 |
1837.869 |
| 254 |
1064567.610 |
839615.542 |
1797.492 |
| 387 |
1064453.418 |
839806.999 |
1869.536 |
Fuente: elaboración propia
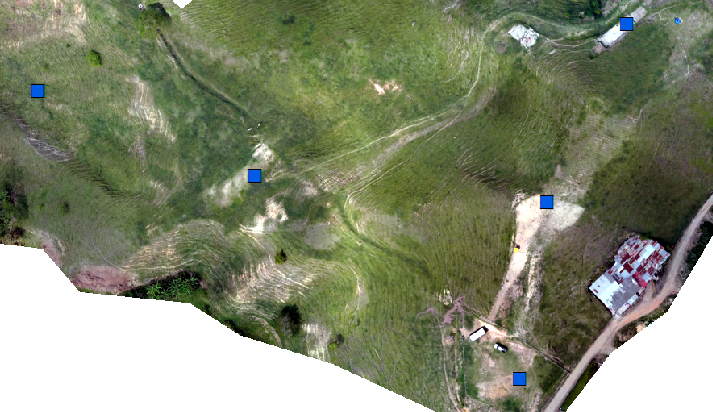
Fig. 4. Puntos de control aéreo.
Fuente: elaboración propia.
2.7. Procesamiento
2.7.1. Procesamiento UAV
En el procesamiento de las imágenes, el primer paso realizado fue la orientación automática de las fotografías a partir de la búsqueda de puntos clave. En segundo lugar, se realizó el ajuste con base en los puntos de control aéreo tomados en campo. Esta labor se llevó a cabo ubicando un marcador en el punto donde se encuentra cada marca en las fotografías, se calibraron los colores y el balance de blancos, se creó la nube de puntos densa y se coloreó la nube a partir de las fotografías. Después se realizó una clasificación automática de los puntos, y una vez el software realizó la tarea se procedió a revisar el mosaico, corrigiendo los posibles errores en la clasificación. En tercer lugar, se creó la malla, las máscaras, el texturizado y el modelo de teselas.
Con estos modelos se generó el modelo digital de elevación, y el ortomosaico, para posteriormente generar las curvas de nivel, las cuales en este caso fueron hechas con una diferencia de un metro. La razón para no usar una distancia inferior fue que estas se cortaban, lo cual generaba conflictos en la creación de las superficies, e impedía el análisis comparativo. Posteriormente, usando el software AutoCAD Civil 3d, se cargaron las curvas de nivel y se creó una superficie a partir de estas, la cual puede ser observada en la figura 5.
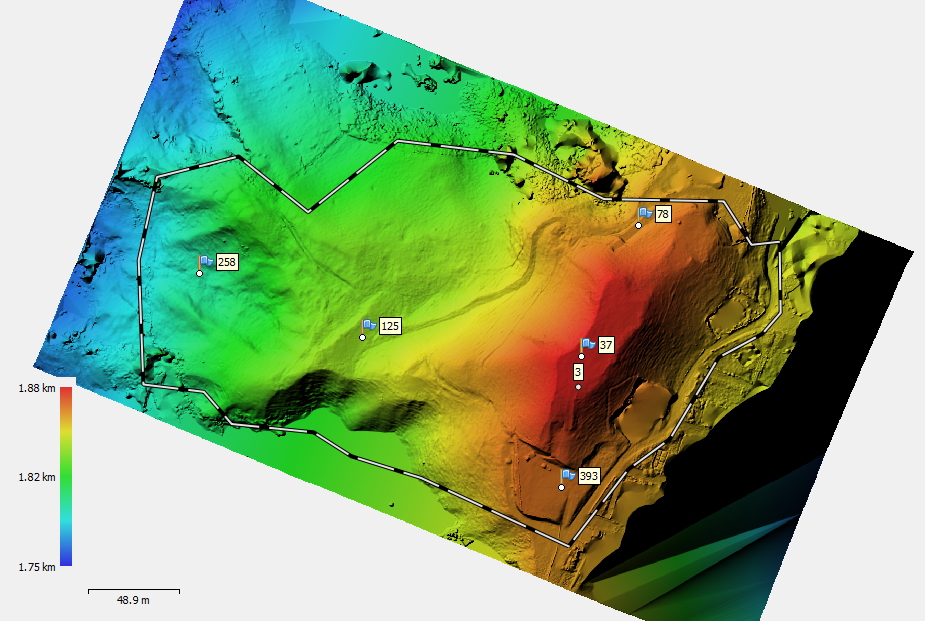
Fig. 5. Modelo digital de elevación software fotogramétrico.
Fuente: elaboración propia.
Cabe mencionar que se realizaron dos procesamientos de imágenes. La diferencia radica en que en uno de ellos no se realizó el ajuste geográfico con los puntos de control aéreo.
2.7.2. Procesamiento Antenas GNSS y con Estación Total
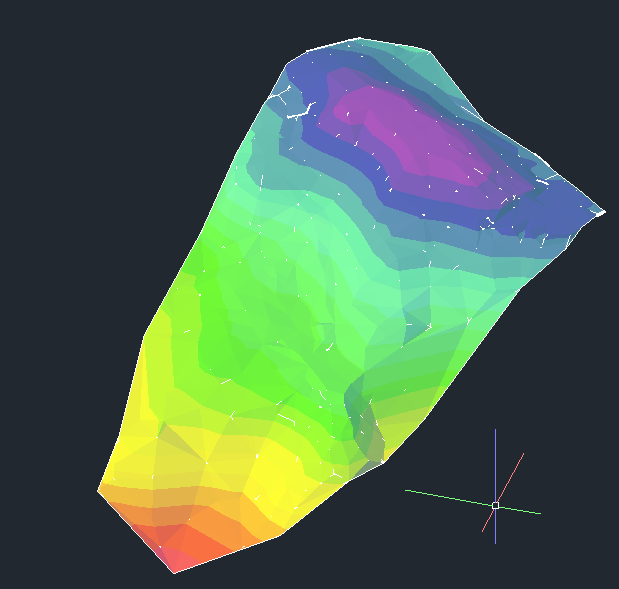
Fig. 6. Modelo rainbow de la zona de estudio según datos tomados con estación total.
Fuente: elaboración propia.
El procesamiento en el caso de las antenas GNSS y estación total siguió un procedimiento similar. En ambos casos, usando la información tomada en campo, se creó una nube de puntos usando el software AutoCAD Civil 3D y posteriormente se generó una superficie con sus respectivas curvas de nivel. En la Figura 6, mostrada previamente, se puede observar el modelo rainbow generado por el software AutoCAD Civil 3D, a partir de los datos tomados con la estación total.
3. ANÁLISIS DE PRECISIÓN
3.1. Comparación de puntos tomados directamente en terreno
Al comparar los resultados obtenidos con las tres tecnologías usadas para este estudio, se encontró que la superficie creada a partir de los datos obtenidos con el UAV sin puntos de control poseía un desfase en su componente horizontal de más de 3 metros y en su componente vertical de más de 5 metros. Por esta razón, se decidió volver a generar las curvas de nivel, haciendo una corrección mediante el desplazamiento de todo el conjunto, tomando como referencia el punto CTRL9, con las coordenadas X, Y y Z obtenidas por medio del método UAV con puntos de control, lo cual permitió hacer una corrección de la precisión absoluta de este método, y así poder realizar un análisis de la precisión relativa respecto a los otros. A partir de los puntos de control se crearon varias tablas comparativas donde se analizaron tanto las diferencias entre los conjuntos de datos en cada una de sus componentes cartesianas, como el error medio cuadrático en la componente vertical y horizontal. A continuación, se puede observar en la tabla 4 la comparación de los puntos tomados en terreno y las coordenadas obtenidas del modelo con puntos de control UAV en el espacio modelo del Software fotogramétrico.
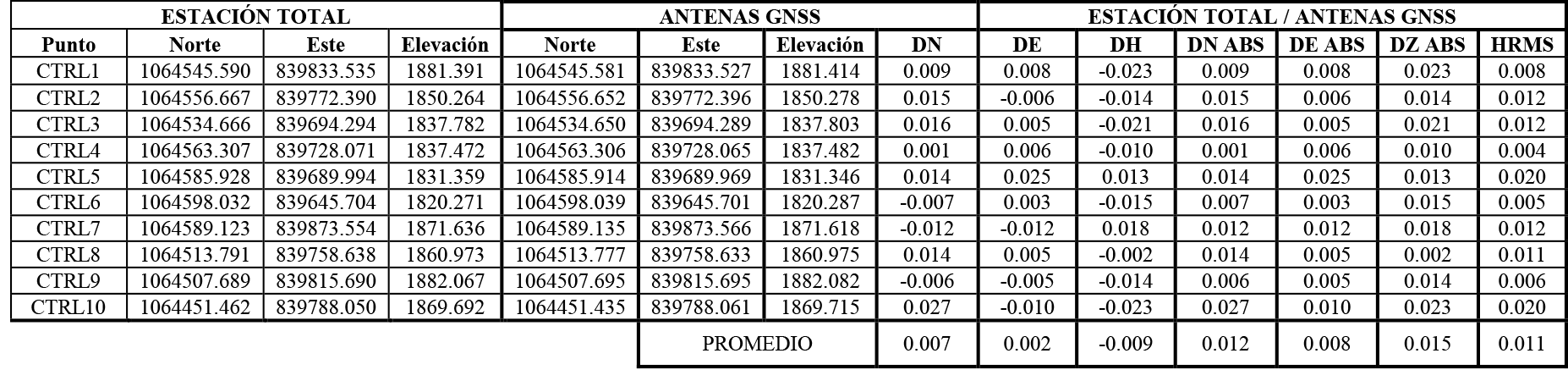
Tabla 4: Comparativo de puntos de control: Estación Total & Antenas GNSS
Fuente: elaboración propia
3.2. Comparación de Estación Total & UAV con Puntos de Control
En esta primera comparación se puede observar que la diferencia entre las componentes Norte, Este y Elevación tomadas con la estación total y los equipos GNSS es bastante baja. Entre ambos métodos se encontraron unas diferencias promedio absolutas de 0.012 m en la componente norte, 0.008 m en el componente este y 0.015 m en la altura. Al realizar la revisión de los promedios del error medio cuadrático horizontal, se comprobó que este fue de 0.011 m.
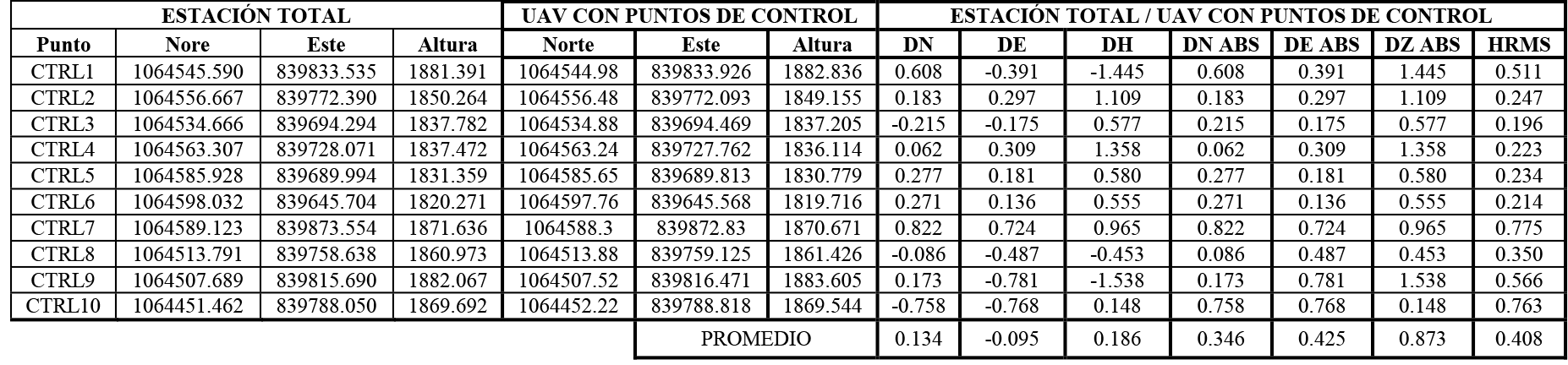
Para el caso comparativo entre la estación total y UAV apoyado de puntos de control se tuvo una diferencia mucho mayor en todos los ítems analizados, tal y como se puede observar en la tabla 5. Atendiendo al error medio cuadrático horizontal se tiene un promedio de 0.408 m y un error promedio absoluto en la vertical de 0.873 m. Por otro lado, al analizar el promedio de las diferencias, se observa que en la componente norte se tiene un desfase de 0.134 m, en la componente este de -0.095 m y en la altura de 0.185 m. Lo que es un indicativo de que no existe un desplazamiento general, ya sea vertical u horizontal del conjunto UAV con puntos de control, sino discrepancias alrededor de todo el conjunto de datos.
Tabla 5: Comparativo puntos de control: Estación Total & UAV con puntos de control.
Fuente: elaboración propia
Usando las coordenadas de los puntos de control tomadas con la estación total como base, se procedió a comparar las alturas de terreno en las superficies generadas por el software AutoCAD Civil 3d, como se observa en la figura 7. En este caso sí se incluyó el modelo generado de los vuelos con UAV sin puntos de control aéreo.
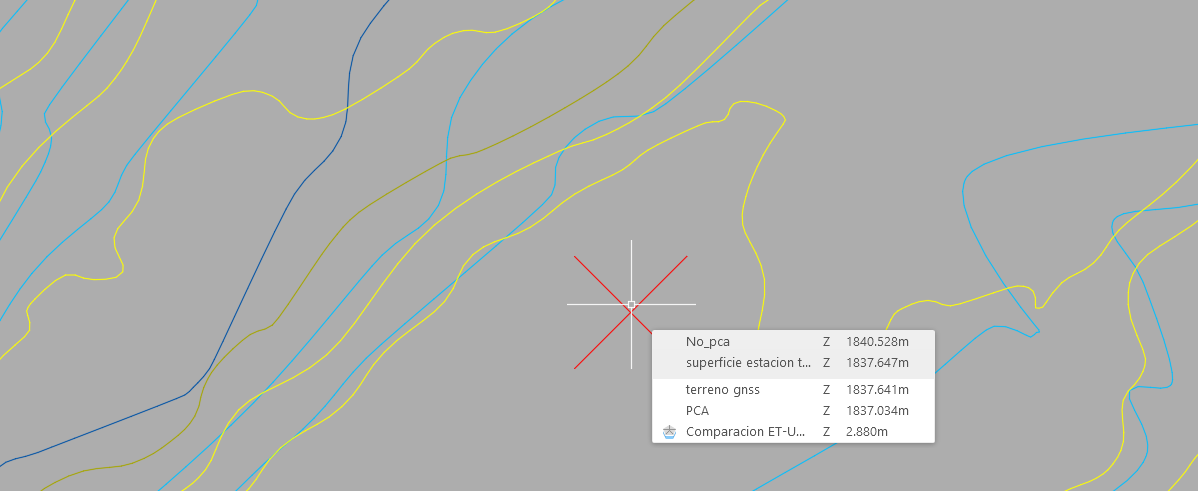
Fig. 7. Comparación de Alturas sobre las superficies.
Fuente: elaboración propia.
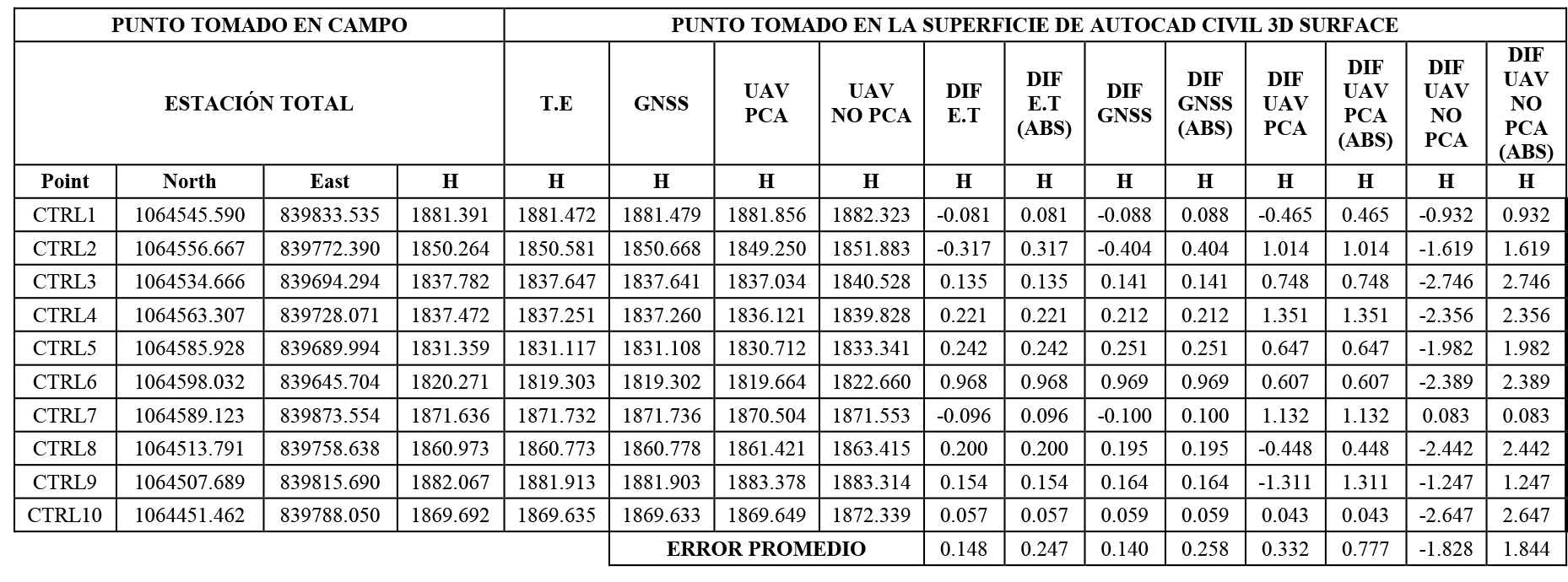
Tal y como puede observarse en la tabla 6, los puntos tomados sobre la superficie creada a partir de los datos obtenidos con la estación total arrojaron unas discrepancias promedio absolutas de 0,247 metros. Mientras que las antenas GNSS obtuvieron números similares (0,258 metros). El método UAV con puntos de control aéreo vio reducida su discrepancia en la altura respecto a los datos tomados en terreno con estación total a 0,777 metros, mientras que el método UAV sin puntos de control arrojó una discrepancia de 1,844 metros, siendo esta la más alta de todas y doblando las discrepancias con el método UAV con puntos de control.
Tabla 6: Comparativa de puntos de control tomados en campo con estación total y puntos revisados en las superficies.
Fuente: elaboración propia
3.3. Comparación de superficies
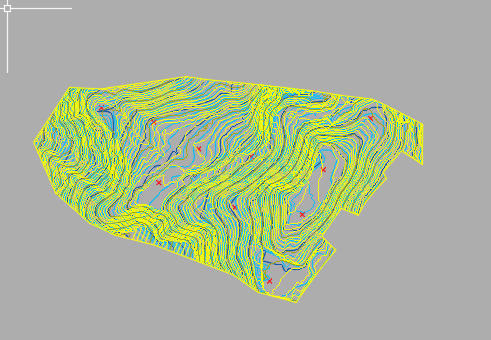
Fig. 8. Comparación de superficies en AutoCAD Civil 3D.
Fuente: elaboración propia.
Después de comparar la precisión de puntos individuales con las tecnologías objeto de este estudio, se procedió a realizar una comparación de las superficies generadas a partir de la información recolectada. Para ello se cargaron las cuatro superficies en el mismo espacio de trabajo usando el software AutoCAD Civil 3D, como se observa en la figura 8.
En primera instancia, se realizó una inspección visual del conjunto de curvas de nivel obtenidas con cada una de las tecnologías. En segundo lugar, se procedió a realizar un cálculo de volúmenes de cortes y llenos, tal y como se observa en la tabla 7. Finalmente, se procedió a dividir las diferencias de volúmenes en el área total de estudio y así obtener una diferencia de altura promedio entre las superficies. Para este ejercicio comparativo se tomó como base la superficie generada por los datos adquiridos con la estación total.
Tabla 7: Reporte comparativo de superficies.

Fuente: elaboración propia
3.3.1. Caso Estación Total & Receptores GNSS
Al realizar la inspección visual de las dos superficies creadas a partir de los datos obtenidos con estación total y antenas GNSS, se observó que las curvas de nivel poseen la misma forma, y se encontraban a una distancia de milímetros. Es más, en algunas zonas las dos se sobreponían o cortaban levemente, lo que evidenció una gran similitud entre ellas. El cálculo de volúmenes confirma la gran semejanza entre las dos superficies, ya que al dividir el total de lleno y excavación por el área total de la zona de estudio se obtuvo una diferencia promedio de -0,004 metros.
3.3.2. Caso Estación Total & UAV con Puntos de Control
Si bien visualmente se observan diferencias entre las dos superficies, también cabe resaltar que en líneas generales hay similitud entre los dos conjuntos y que las dos superficies describen morfológicamente la zona de estudio. Las zonas donde se encuentran más discrepancias corresponden con sitios de hierba donde el programa de procesamiento no logró determinar la altura real del terreno. Una vez realizado el análisis con el software se obtuvo una diferencia promedio 1,089 metros, diferencia que sigue lo observado en los anteriores análisis.
3.3.3. Caso Estación Total & UAV sin Puntos de Control
En este caso también se observa el mismo patrón que en el caso anterior, pero más agudo, dado que las diferencias encontradas son aún mayores. Al realizar el análisis con el software AutoCAD Civil 3D, se obtiene la mayor discrepancia entre los métodos analizados en este estudio, con un promedio de 1,799 metros. Esto evidencia la importancia del apoyo que los puntos de control aéreo aportan en el procesamiento y labores de toma de datos.
4. ANÁLISIS CRONOLÓGICO
Para este análisis se dividieron los métodos en dos partes, trabajo de campo y trabajo de oficina. Para determinar los tiempos individuales de la estación total se tomaron en consideración para este análisis los periodos de la creación de la poligonal, los cambios de armada y la ubicación del prisma. En el caso particular de las antenas GNSS, se tomó en cuenta el tiempo en que la antena Rover tardó en fijar el punto a referenciar. Adicionalmente, en todos los casos se tuvo en cuenta el tiempo requerido para el desplazamiento desde la oficina hasta el terreno, la hora de comida (en casos en los que el tiempo en terreno superase las 4 horas), el cual se incluyó en el ítem “tiempo de descanso”, las pausas para hidratación se incluyeron en el caso de la estación total en el ítem “radiación de todos los deltas” y para el caso de las antenas GNSS en el ítem “toma de puntos”.
Es necesario aclarar que, debido a que el levantamiento con estación total requirió de dos días de trabajo en terreno, se le asignó el doble de tiempo al apartado “desplazamiento”.
El apartado de puntos base con GNSS se incluyó en la estación total debido a que en la zona no se encuentran puntos ya georreferenciados y en caso de no realizar la referenciación de dos puntos base con las antenas GNSS se generaría una rotación en todo el levantamiento, así como una precisión absoluta menor. En el apartado de UAV con puntos de control se incluyó este ítem, ya que este es un método muy extendido para la georreferenciación de puntos de control aéreo.
Se incluyó un ítem correspondiente al tiempo utilizado para inspeccionar el terreno antes de iniciar las labores de medición. Esto se debe a que inspeccionar el terreno antes de comenzar las labores permite hacerse una idea de la zona, identificar los mejores puntos para posicionar los puntos topográficos base y deltas, reconocer zonas potencialmente peligrosas, así como la mejor zona para realizar el despegue de la aeronave. La tabla 8 muestra un resumen comparativo de los tiempos en terreno que requirieron cada uno de los cuatro métodos analizados.
Tabla 8: Comparativo de tiempos requeridos para realizar las labores de campo.
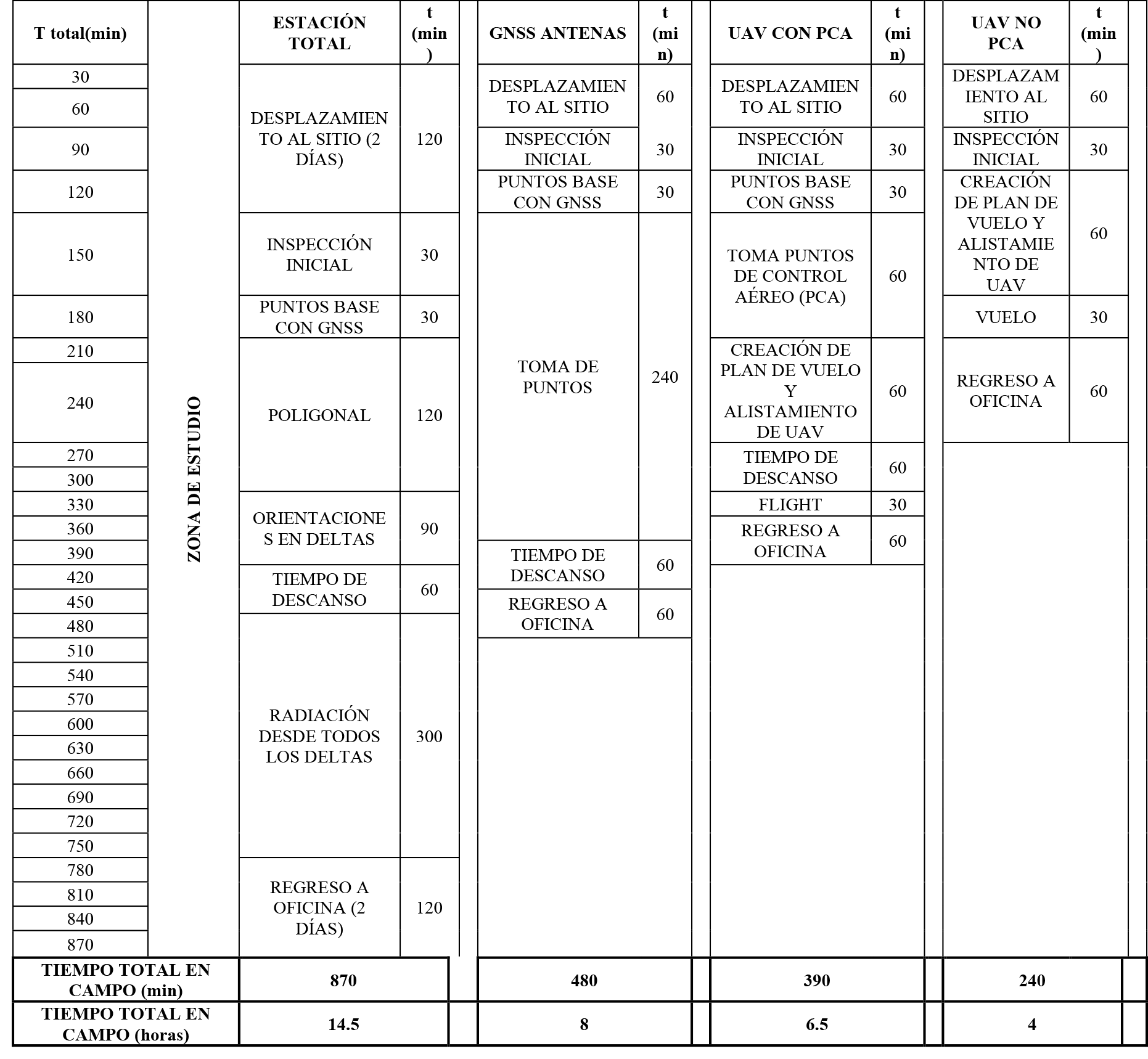
Fuente: elaboración propia
Para la captura de datos con la estación total se requirieron un total de 14.5 horas, lo cual, tomando en cuenta que un día laboral consta de 8 horas, esto equivaldría a 2 días de trabajo en campo. Gran parte del tiempo que requirió la medición del terreno con este método se explica por la necesidad de realizar varios cambios de punto base, para este caso en particular se requirieron 5 Deltas. Por su parte, para poder llevar a cabo las mediciones con las antenas GNSS, es necesario realizar la toma de todos los puntos directamente en terreno. El total de tiempo requerido para realizar esta labor con los equipos GNSS fue de 8 horas, lo cual equivale a un día de trabajo. Como se esperaba, la captura de datos con UAV requirió un menor tiempo en terreno. En el caso de las mediciones con UAV sin puntos de control aéreo el tiempo necesario fue de 4 horas, mientras que con puntos de control aéreo fue de 6.5 horas, lo cual es menos de un día de trabajo. No obstante, es preciso tener en cuenta que, si bien la toma de datos sin puntos de control aéreo es con diferencia el más rápido, este posee una precisión, relativa y absoluta, muy inferior a los otros métodos analizados.
En el apartado de trabajo de oficina se tomó como base la creación de un plano que represente el terreno mediante curvas de nivel. Los procesamientos fotogramétricos son los que necesitaron una mayor cantidad de tiempo, con un total de 11.5 horas para UAV con puntos de control aéreo, y 11 horas para UAV sin puntos de control aéreo. Ahora, se debe tener en cuenta que la mayor parte de los procesos fotogramétricos son automáticos, y la velocidad con los que se completan depende en gran medida de la potencia del equipo informático utilizado. Para la creación del presente plano, los únicos procesos que necesitaron atención durante su desarrollo fueron la rectificación con puntos de control, la clasificación manual de puntos y los procesos comunes a todos, como el ítem de creación de superficies y elaboración de planos. Mientras tanto, la diferencia entre estación total y antenas GNSS radica en la necesidad de dedicar tiempo al cálculo y ajuste de la poligonal. En este último apartado la tecnología que requirió menos tiempo fueron las antenas GNSS. En la tabla 9 se puede observar de manera detallada los tiempos de oficina asociados a cada uno de los métodos analizados.
Tabla 9: Comparativa de tiempos requeridos para realizar las labores de oficina.
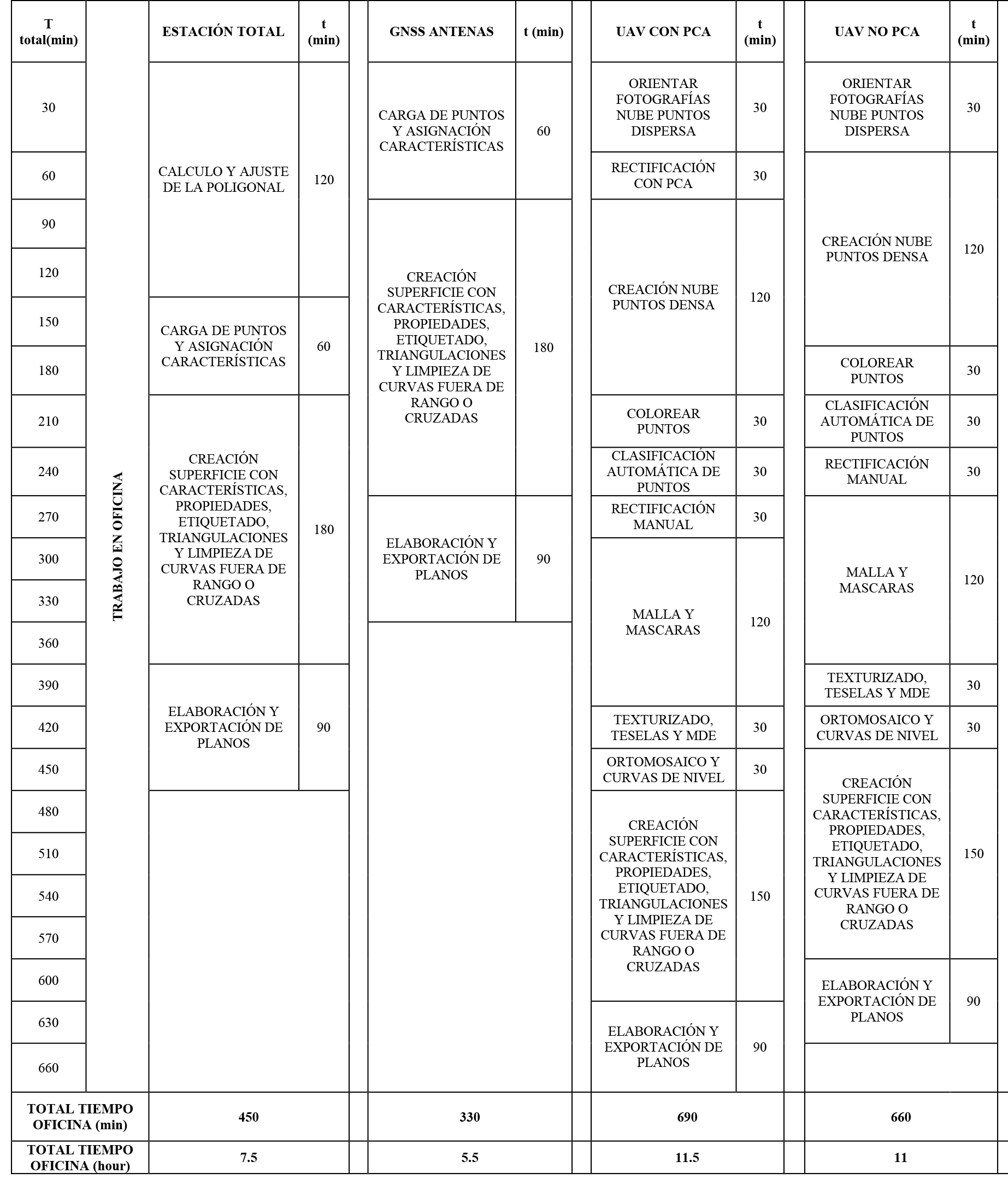
Fuente: elaboración propia
El tiempo total de trabajo requerido para completar el trabajo con la estación total fue de 22 horas, el requerido por las antenas GNSS fue de 13.5 horas, el del UAV con puntos de control aéreo fue de 18 horas, y como se esperaba, la ejecución de UAV sin puntos de control aéreo fue el que necesitó menos tiempo, tomando un total de 15 horas.
Tabla 10: Tiempos total de ejecución.

Fuente: elaboración propia
Es importante mencionar que, en el caso del procesamiento de datos con UAV, es posible disminuir el trabajo de oficina por medio del uso de métodos alternativos de procesamiento. Por ejemplo, si se omiten tanto la creación de mallas de texturas como modelo de teselas, pasando de la clasificación de puntos al modelo digital de elevación directamente, el tiempo de procesamiento disminuye. En una futura investigación sería importante introducir esta variable y realizar un comparativo entre superficies procesadas con y sin estos ítems. Si se hubiera dejado de hacer los procesos mencionados anteriormente, la ejecución total de UAV con puntos de control aéreo pasaría a tener 13.5 horas mientras que UAV sin puntos de control aéreo tendría un total de 10.5 horas.
5. CONCLUSIONES
Si lo que se requiere es la máxima precisión posible, la estación total sigue siendo el equipo idóneo. Sin embargo, esta precisión se consigue a costa de un aumento considerable en el tiempo de ejecución, el cual puede llegar a ser más del doble si lo comparamos con las alternativas que analizamos en este estudio.
Las antenas GNSS usando RTK son un fuerte competidor en términos de precisión y tiempo de ejecución, ofreciendo una alternativa viable a la estación total no solo para los levantamientos iniciales, sino también para el control de cantidades de obra o levantamientos que requieran una gran exactitud en la representación geomorfológica. Esta tecnología ofrece un rendimiento excepcional, en gran parte debido a su excelente recepción por satélite y a la comunicación sin fisuras entre la Base y el Rover durante la recogida de datos. Sin embargo, es importante señalar que la ausencia de cualquiera de estas dos condiciones podría provocar una degradación significativa de los datos, lo que podría dar lugar a errores en la vertical y en la horizontal por encima del metro, lo que podría hacer que el método no fuera adecuado para levantamientos altimétricos de alta precisión.
Por último, comprobamos que la precisión del procesamiento de imágenes tomadas con UAV no especializados se ve afectada en zonas con alturas variables y cambios constantes de pendiente y morfología. Debido a estas limitaciones, recomendamos llevar a cabo una densificación adecuada y establecer múltiples puntos de control en la zona, especialmente en ubicaciones muy irregulares, para mejorar la precisión absoluta y relativa
. Ahora bien, el uso de UAV es una excelente opción si lo que se requiere es representar geomorfológicamente una zona y no es necesario tener una precisión centímetrica. Más aun, esta tecnología tiene como ventajas adicionales el requerir un menor tiempo de trabajo en campo, poder obtener información de zonas inaccesibles o que puedan representar un peligro para el personal en terreno, además de proporcionar un producto como el ortomosaico; el cual, a pesar de que no se tuvo en cuenta en este estudio, aporta una imagen y detalles que son imposibles de otorgar por un modelo digital de elevación o unas curvas de nivel.
Es importante señalar que el rendimiento del UAV en terreno se vio afectado por diversas condiciones externas. En primer lugar, el UAV experimentó condiciones meteorológicas desfavorables, incluidos fuertes vientos con rachas superiores a 40 km/h durante los vuelos. Estas condiciones dificultaron la ejecución del plan de vuelo con fines fotogramétricos, ya que se requiere estabilidad y velocidad constante. El elevado error de guiñada en el informe de procesamiento fotogramétrico confirmó este problema. En segundo lugar, se produjo una disminución significativa de la calidad de la señal GPS en diferentes puntos durante los planes de vuelo. Por último, en este estudio sólo se fijaron 5 puntos de control aéreo, que más tarde resultaron insuficientes. Todas estas condiciones ayudan a explicar por qué estudios o proyectos anteriores de los mismos autores obtuvieron mejores resultados, especialmente en zonas llanas o tareas planimétricas en las que se alcanzó una precisión inferior a 5 centímetros.
En resumen, no podemos afirmar definitivamente qué tecnología o equipo es mejor. Depende de los objetivos del trabajo, de la precisión requerida, de las condiciones geomorfológicas y climáticas, y del tiempo y los recursos disponibles. Además, en determinados proyectos puede ser necesario utilizar varias tecnologías debido a las necesidades de los productos que se van a suministrar, las condiciones climáticas o la geomorfología del terreno que se va a estudiar.
RECONOCIMIENTOS
Este Artículo es un producto derivado del Proyecto de Iniciación Científico con código PIC-DIS-3879, financiado por la Vicerrectoría de Investigaciones de la Universidad Militar Nueva Granada. Adicionalmente, los autores le dan crédito a la Universidad Militar Nueva Granada por el apoyo recibido en el desarrollo de esta investigación y en la preparación de este documento científico.
REFERENCIAS
[1] D. Dinkov, "A Low Cost Method UAV-PPK - Accuracy and Application," from XXIX International Symposium on Modern Technologies, Education and Professional Practice in Geodesy and Related Fields, Istanbul, 2019.
[2] S. Kc, S. Shrestha, S. Upadhyaya, and S. Bhandari, "Integration of GNSS, Total Station, and Grid Controls: An Analysis of Combined Effect of Elevation of Topography and Map Projection Distortion to Solve the Distance Discrepancy," Journal on Geoinformatics Nepal, pp. 49-61, May 2024.
[3] S. Khudhur Hussein and K. Yaseen Abdulla, "Surveying with GNSS and Total Station: A Comparative Study," Eurasian Journal of Science & Engineering, vol. 7, no. 1, pp. 59-73, 2021.
[4] G. S. Srivastava, "Introduction to Geoinformatics," 1 ed, McGraw Hill Education, 2014.
[5] J. McCormac, Topography, Mexico: Limusa Wiley, 2013, p. 177.
[6] N. Garrido-Villen, "Researching GNSS and property delimitation," 14 09 2014. [Online]. Available: https://nagarvil.webs.upv.es/.
[7] R. I. Abdulmajed and R. A. Abbak, "ACCURACY COMPARISON BETWEEN GPS ONLY AND GPS PLUS GLONASS IN RTKAND STATIC METHODS," Asian Journal of Science and Technology, vol. 8, no. 11, pp. 6697-6703, 2017.
[8] E. Ferrer Gonzales, F. Agüera Vega, F. Carvajal Ramirez, and P. Martinez Carricondo, "UAV Photogrammetry Accuracy Assessment for Corridor Mapping Based on the Number and Distribution of Ground Control Points," Remote Sens, vol. 12, no. 2447, 2020.
[9] M. T. Hidayat, A. Wicaksono, and D. A. Siswanto, "Data Acquisition Tree Height and Areal Parameters of Mangrove Vegetation Using UAV," BIO Web of Conferences, vol. 89, no. 7002, 2024.
[10] B. Szypuła, "Accuracy of UAV-based DEMs without ground control points," GeoInformatica, vol. 28, pp. 1-28, 2023.
[11] C. Hugenholtz, O. Brown, J. Walker, T. Barchyn, P. Nesbit, M. Kucharczyk, and S. Myshak, "Spatial Accuracy of UAV-Derived Orthoimagery and Topography: Comparing Photogrammetric Models Processed with Direct Geo-Referencing and Ground Control Points," Geomatica, pp. 21-30, 2016.
[12] Instituto Geográfico Agustin Codazzi, “ABC-Nueva proyección cartográfica para Colombia”, 2020. [Online]. Available: https://origen .igac.gov.co/docs/ABc_Nueva_Proyeccion_Cartografica_Colombia.pdf.
[13] Q. Vu Ngoc, H. Nguyen Viet, L. Ta, and V. Hung, "A Comparative Study of UAV Lidar, UAV, and GNSS RTK on Infrastructure Survey," IOP Conference Series Materials Science and Engineering, August 2023.
[14] H. Xu, Z. Zhang, and Y. Wen, "Resilient inequality constrained GNSS kinematic precise point positioning considering the terrain topography," Measurement Science and Technology, vol. 35, no. 5, 02 2024.
[15] Groos, R. Aeschbacher, M. Fischer, N. Kohler, C. Mayer, and A. Senn-Rist, "Accuracy of UAV Photogrammetry in Glacial and Periglacial Alpine Terrain: A Comparison With Airborne and Terrestrial Datasets," Frontiers in Remote Sensing, vol. 3, pp. 1-16, JUNE 2022.
[16] N. Villalba Sánchez, Topografía Aplicada, 1 ed., Lima: Macro, 2015, pp. 152-162.
 1,
PhD. Saieth Baudilio Chaves Pabón
1,
PhD. Saieth Baudilio Chaves Pabón