Desarrollo e implementación de unidad de monitoreo remoto para aplicaciones de protección catódica
Development and implementation of a remote monitoring unit for cathodic protection applications
Resumen: Este documento presenta el desarrollo de un sistema de monitoreo remoto (SMR) para el seguimiento y control de unidades rectificadoras de protección catódica (URPC). Asimismo, se presentan las etapas de desarrollo desde su concepción, implementación, validación en laboratorio e implementación en ambiente industrial. Dicho sistema se basa en una red IoT compuesta por un equipo hardware encargado de adquirir las variables de entrada y salida de la operación de las URPCs, llamado Unidad de Monitoreo Remoto (UMR), transmisión de la data recolectada vía MQTT y una plataforma Web con servicio complementarios para la adquisición de la data y la gestión de los activos monitoreados.
Palabras clave: Corrosión, Protección catódica, Unidades rectificadoras, IoT, Microcontroladores, MQTT, CBOR, Modbus.
Abstract: This document presents the development of a Remote Monitoring System (RMS) for the monitoring and control of cathodic protection rectifier units (CPRUs). It also outlines the developmental stages from conception, implementation, laboratory validation, to industrial deployment. This system is based on an IoT network composed of hardware equipment responsible for acquiring input and output variables of CPRU operation (Remote Monitoring Units - RMUs), transmission of collected data via MQTT, and a web platform with complementary services for data acquisition and management of monitored assets.
Keywords: Corrosion, Cathodic protection, Rectifier units, IoT, Microcontrollers, MQTT, CBOR, Modbus.
1. INTRODUCCIÓN
La corrosión es un fenómeno que genera pérdidas económicas anuales del orden de billones de dólares debido al deterioro de infraestructura
. Una técnica efectiva y ampliamente difundida en la industria de Oil&Gas para proteger estructuras metálicas, tanto sumergidas como enterradas, es el uso de protección catódica (PC)
mediante la inyección de corriente impresa por medio de unidades rectificadoras (URPC)
. El uso de esta técnica requiere la inyección constante de corriente y en un rango determinado para cada sistema de acuerdo a condiciones del medio
. Alteraciones en los parámetros de operación pueden desencadenar problemas como disbonding catódico, corrosión, interferencias, corrientes errantes, entre otros fenómenos detrimentales para la vida útil de los activos, por lo que se requiere un monitoreo constante al funcionamiento de las URPCs
.
Para oleoductos y gasoductos se instalan URPCs y camas anódicas a lo largo del trazado de la tubería haciendo que la ubicación de estas URPCs puede darse en locaciones remotas de difícil acceso
. Así mismo, la inspección de estos equipos requiere un personal capacitado, lo que implica un elevado costo de monitorización y mantenimiento de los equipos
.
En Colombia empresas del sector hidrocarburos han adquirido e instalado UMRs de desarrollo norteamericano y europeo. Sin embargo, la adaptación de estos productos a las condiciones ambientales de la región ha ocasionado complicaciones en su funcionamiento. Entre estas complicaciones se encuentran: vulnerabilidad ante descargas atmosféricas, impedancias y resolución de los canales de medición inadecuados para las variables a medir, tiempos prolongados de respuesta para soporte a nivel local como de casa matriz. Asimismo, los costos de servicios de comunicación y acceso a plataformas han reducido la penetración del producto a nivel nacional, lo que ha motivado el desarrollo de estas tecnologías por parte del sector privado como el sector público a nivel nacional
.
La Corporación para la Investigación de la Corrosión, CIC, presenta a continuación su experiencia con el desarrollo de un SMR para monitoreo de sistemas de protección catodica (SPC), desde su concepción a hasta su implementación.
2. REQUERIMIENTOS DE DISEÑO
El desarrollo de esta UMR inicia con el levantamiento de requerimientos, los cuales se capturan a partir del estado del arte y literatura, equipos comercialmente activos, recolección de experiencias en especialistas del área y necesidades específicas del mercado local, apuntando al mercado internacional.
2.1. Unidad Rectificadora de Protección Catódica
Un rectificador de protección catódica es una máquina que convierte energía proveniente de una red de corriente alterna (AC) en corriente directa (DC). A esta máquina se conecta el terminal negativo a la tubería y el terminal positivo a la cama anódica y mediante el ajuste de taps se configura la corriente que se inyecta a la cama anódica para proteger la tubería
. Su configuración puede observarse en la Fig. 1.
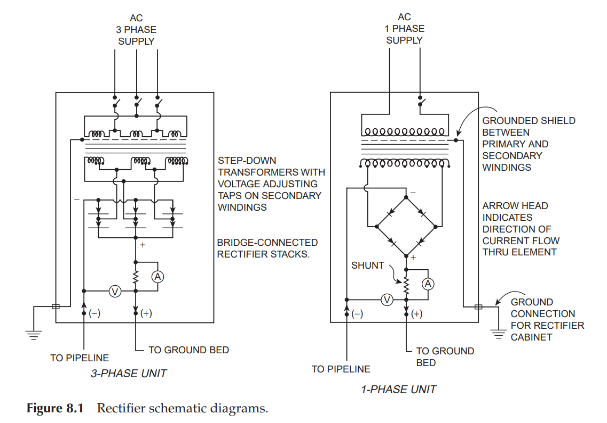
Fig. 1. Circuitos esquematicos de URPCs trifasicos y monofasicos.
Fuente: Peabody's Control of Pipeline Corrosion, 3rd Edition
2.2. Parámetros a Monitorear
Para configurar adecuadamente la intensidad de corriente que se debe suministrar la URPC la industria ha adoptado las recomendaciones del estandar NACE RP-01-69
:
- Potencial de estructura de -850mV o más electronegativo medido con respecto electrodo saturado cobre-sulfato de cobre (Cu/CuSO4).
- Potencial polarizado de estructura (Potencial On) de -850mV o más electronegativo medido con respecto electrodo saturado cobre-sulfato de cobre.
- Diferencia de -100mV entre el potencial On y el potencial medido una vez sea apagado el rectificador (Instant Off).
Como se menciona en los criterios del Estándar NACE, la medición de potenciales se realiza con respecto a un electrodo Cu/CuSO4, generalmente se instala un electrodo permanente cercano a la estructura protegida
.
Debido a que este potencial depende, ademas de factores como humedad, clima, suelo, entre otros, es valioso para el operador de la URPC conocer las variables de salida de su maquina, como lo son el potencial y corriente de salida DC, con la que pueden identificar cambios en la impedancia del sistema protegido. Como las variables de salida dependen proporcionalmente de los cambios del potencial RMS de entrada de la URPC, tambien es relevante monitorear potencial y corriente AC de entrada
. En la tabla 1 se relacionan los rangos, resoluciones, impedancias y precisiones requeridos para el monitoreo del rectificador.
Tabla 1: Variables a medir y requisitos.
| Variable |
Rango |
Resolución |
Impedancia entrada |
Precisión |
| Voltaje Entrada |
0-600V |
0.1V |
20Mohm |
0.1%FS |
| Corriente Entrada |
0-100 mV |
0.1mV |
20Mohm |
0.1%FS |
| Voltaje Salida |
±100V |
0.1V |
20Mohm |
0.1%FS |
| Corriente Salida |
±100 mV |
0.1mV |
20Mohm |
0.1%FS |
| Potencial On |
±10V |
0.01mV |
20Mohm |
0.1%FS |
| Potencial Instant Off |
±10V |
0.01mV |
20Mohm |
0.1%FS |
Fuente: elaboración propia
Cabe resaltar que para la medición de corriente se hará uso de una resistencia shunt, por lo cual el equipo a diseñar medirá un potencial en lugar de una corriente.
2.3. Ciclado Sincronizado entre Unidades
Para validar la efectividad del sistema de protección catódica existen pruebas para verificar si los criterios de protección se están cumpliendo a lo largo del trazado de la tubería. Para ello es necesario cortar el suministro de corriente de las fuentes que protegen el sistema y medir localmente potenciales instant Off para posterior comparación con potenciales On. Debido a que en una zona se puede presentar inferencia de más de una URPC se hace necesario apagar y encender de forma sincronizada, razón por la cual cada UMR debe contar con un actuador que permita la desconexión del URPC de forma segura y una referencia de tiempo que permita el control síncrono de dicho actuador
.
2.4. Comunicación
El dispositivo UMR a diseñar va a ser instalado en zonas donde la cobertura de red celular u otro tipo de redes celulares no están disponibles, por lo que debe tener compatibilidad para comunicación vía satelital.
2.5. Vida Útil y Mantenibilidad
El equipo a diseñar debe ser robusto, puesto que las condiciones de temperatura, humedad y estabilidad de la red no son las ideales. Por otra parte, se identifican como fuentes potenciales de daño las sobretensiones por parte del suministro eléctrico y de la URPC, como también posibles descargas atmosféricas.
Como es previsible que el equipo deba ser intervenido para mantenimientos preventivos y correctivos, como también reparaciones y calibraciones en sitio, el diseño a implementar debe proveer las facilidades para la manipulación segura del equipo en campo.
2.6. Modo Seguro Ante Fallos
La UMR diseñada no debe afectar la operación ni disponibilidad del suministro de corriente al sistema de PC ante un fallo. Tampoco, bajo ninguna circunstancia, debe poner en riesgo a sus operadores o equipos asociados si es manipulada adecuadamente.
2.7. Funcionalidad
La función principal de la UMR es medir periódicamente las variables de operación de la URPC, almacenarlas localmente a modo de respaldo y transmitir la información recolectada
. También debe permitir la recepción de comandos de forma asíncrona y el control de apertura y cierre de salida de la URPC.
2.8. Captura de Datos y Visualización
Se requiere el desarrollo de una solución web que integre y gestione los datos provenientes de diversos dispositivos de monitoreo distribuidos, ofreciendo una visualización en tiempo real de los parámetros a monitorear y un sistema de alerta temprana ante posibles anomalías
. La solución web facilitará el acceso remoto y colaborativo a la información, así como la manipulación de los datos históricos y actuales para realizar análisis comparativos y predictivos. La solución web también deberá soportar la comunicación bidireccional con los dispositivos de monitoreo a través de diferentes protocolos estándar y proporcionar un mecanismo de autorización y autenticación basado en roles para los usuarios. Finalmente, permitirá ejecutar acciones de control y configuración sobre los dispositivos de monitoreo según las necesidades del usuario.
Inicialmente se debe garantizar una disponibilidad del servicio mayor al 95% con la proyección de elevar este porcentaje en el mediano plazo.
3. DISEÑO
3.1. Distribución Hardware
El diseño que se plantea se distribuye en módulos conectables para salvaguardar la UMR de forma parcial ante sobre tensiones en uno o más puntos de conexión del equipo de monitoreo a la URPC. En la fig. 2 se muestra una distribución por bloques.
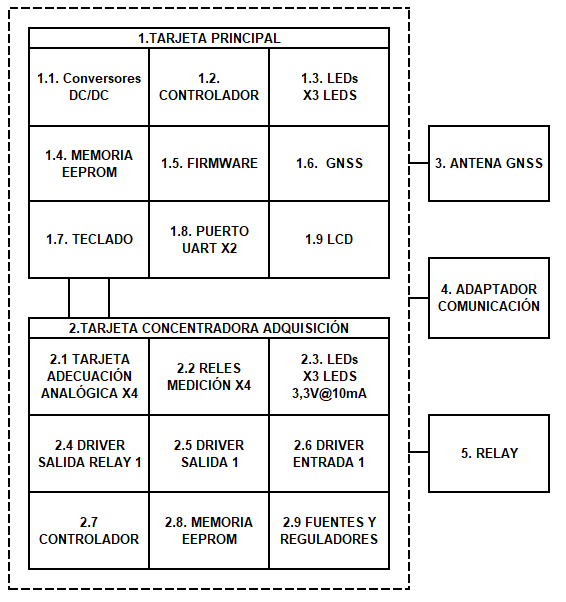
Fig. 2. Distribución por bloques de diseño Hardware del dispositivo UMR.
Fuente: elaboración propia.
3.1.1. Tarjeta principal
El primer módulo se encarga de la lógica de comunicación, control pantalla LCD, lectura de teclado matricial, lectura de placa concentradora sincronización de las señales de ciclado a partir de parámetros de configuración y de la lectura de receptor GNSS para recepción de fecha, hora y pulso de sincronía.
3.1.2. Tarjeta Concentrador Adquisición
Esta placa contiene los módulos de adquisición analógicos para captura de las variables a medir, terminales de entrada y salida para alimentación y conexión con URPC, relés para aislamiento de galvánico con terminales de salida, módulos menores de entrada y salida digital. Cuenta además con su propio circuito para adecuación de potencia y microcontrolador para control de los módulos de adquisición y comunicación con la placa controlador principal.
3.2. Adquisición Analógica
Para la adquisición de variables analógicas provenientes de la URPC se diseña un módulo de adecuación analógica con ganancia variable y aislada galvánicamente. Dicho aislamiento galvánico nos permite medir de forma simultánea múltiples variables sin preocuparnos de generar tierras flotantes o cortos circuitos al momento de instalar la UMR sobre el rectificador y aislar sobretensiones. La distribución de bloques de esta placa se presenta en la Fig. 3.
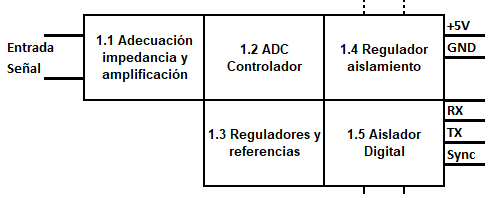
Fig. 3. Distribución por bloques de diseño Hardware del dispositivo UMR.
Fuente: elaboración propia.
El diseño analógico se encuentra compuesto por un amplificador diferencial que recibe la señal a adquirir, un selector analógico para ajuste de la ganancia del circuito, varistor y diodo zener para proteger el circuito a la entrada de las terminales analógicas. Como componente digital se tiene un microcontrolador con un ADC de 16 bits el cual se encarga de la selección de ganancia, comunicación UART, medición sincronizada con pulso externo para medición de parámetros On e Instant Off, cálculo de valores true RMS, DC y AC de las variables a medir, además de un aislador digital para comunicación con placa centralizadora. En el componente de potencia tenemos una fuente de aislamiento, reguladores y fuentes de referencia.
3.3. Ciclado Sincronizado
Para lograr la sincronización entre dispositivos, se plantea el uso de un receptor de posicionamiento GNSS(SICLA), dicho componente, además de entregar posición, fecha y hora, genera una señal de pulso por segundo (PPS), la cual es síncrona entre diferentes receptores sin importar su locación y que es capturada por el microcontrolador del módulo controlador principal para genera la señal de control del actuador de salida.
3.4. Comunicación
Se establecen canales de comunicación: canal Bluetooth para control del dispositivo de forma local y un canal Modbus UART, el cual se enlaza a un conversor Modbus a MQTT ad hoc con salida a puerto Ethernet para conexión a un modem de comunicación satelital o celular.
La decisión de ofrecer un canal Modbus se da para contar con un equipo con un protocolo de comunicación estándar para su uso en estaciones o locaciones que cuenten con una red de comunicación interna, ya sea Modbus RUT o TCP/IP. El canal de comunicación Bluetooth se ofrece para configuración del equipo por medio de un aplicativo que ofrezca una interfaz de control más amigable.
Se elige la comunicación MQTT por la facilidad para la comunicación dada por este protocolo para el envío de diferentes equipos mediante tópicos diferenciados y la facilidad para el intercambio de paquetes sin la necesidad de utilizar direcciones IP fijas para cada dispositivo
.
3.5. Vida Útil y Mantenibilidad
3.5.1 Descargas Atmosféricas
Entre las causas más comunes de los fallos en este tipo de equipos se encuentran las descargas atmosféricas
: un sistema de protección catódica para una línea de hidrocarburo tiene como puntos de entrada el oleoducto, la cama anódica y la acometida para suministro eléctrico, además, si la puesta a tierra de la URPC no es la adecuada puede servir de punto de acceso adicional
.
Teniendo en cuenta que la UMR debe ser conectada al URPC en 8 diferentes puntos (para la medición de 4 valores en simultáneo) más la conexión de suministro eléctrico, se tienen en total 10 puntos de potencial entrada de descarga atmosférica. Es por ello que además de las técnicas de protección convencionales, como lo son el uso de varistores, diodos TVS y arrestadores
, se plantea el uso de relés mecánicos para aislamiento de las tarjetas de adquisición del URPC cuando no esté realizando una medición con el fin de reducir el tiempo de exposición del equipo de monitoreo.
Bajo este esquema la primera barrera de protección que tendrá la UMR será un arrester, el cual intentará disipar la energía de la descarga. La segunda barrera sería el aislamiento ofrecido por los relés de adquisición, la tercera el módulo de adquisición, el cual se encuentra aislado eléctricamente y, por último, el concentrado de adquisición analógico.
3.5.2 Vida útil
La selección de los componentes de la UMR se realizó teniendo en cuenta las condiciones de operación, como alta temperatura y humedad, con prelación con componentes con un mayor MTBF (tiempo medio entre fallos), mayor resistencia ante cargas estáticas y resistencia a la corrosión
. El diseño prioriza la funcionalidad del módulo principal ante los demás, es decir, en caso de fallo de un módulo la UMR es capaz de comunicar su estado operativo y el fallo de uno de los módulos de adquisición no debe alterar la operación de la máquina. A nivel de Firmware cada uno de los microcontroladores tiene salvaguardas para una adecuada recuperación de estado y vigías para reinicios suaves y duros ante eventos no esperados.
3.5.3 Mantenibilidad
La disposición de los componentes al interior de la UMR cuenta con el espacio suficiente para una adecuada manipulación de los relés y diferentes módulos al interior para un rápido reemplazo. Los materiales usados son asequibles y altamente disponibles, por lo que se pueden realizar reparaciones sin mayores costos.
3.6. Plataforma Web
Se plantea un diseño minimalista orientado al cliente que ofrezca una apariencia limpia, simple y profesional, con un enfoque en la funcionalidad esencial y una interfaz de usuario intuitiva. La plataforma constará de cuatro módulos.
3.6.1. Geolocalización en mapa
Este módulo permitirá visualizar la ubicación geográfica de los dispositivos según sus coordenadas, así como su estado de alarma y configuración de ciclado mediante marcadores. Su interacción permitirá visualizar una ventana modal con los últimos datos adquiridos de las variables de monitoreo.
3.6.2. Gestión de dispositivos
Este módulo facilitará la gestión de los dispositivos, los canales de comunicación y las variables de monitoreo mediante operaciones CRUD (crear, leer, actualizar y eliminar).
3.6.3. Panel de visualización y reportes
Este módulo permitirá crear paneles dinámicos para la visualización de datos, que pueden ser personalizados por los usuarios con tres tipos de gráficos (línea, tabla, diagrama circular). Además, generará reportes predefinidos en un rango de fechas de forma fácil y oportuna.
3.6.4. Administración de usuarios
Este módulo permitirá la administración de los diferentes usuarios según sus niveles de acceso y roles asignados. Debido a la proyección y naturaleza de la plataforma, se espera un alto tráfico y volúmenes de datos, para lo cual se deberá adoptar estrategias de manipulación de datos como una base de datos dinámica para el almacenamiento diverso de variables de monitoreo y mecanismos de optimización de flujo de datos con formato JSON.
4. IMPLEMENTACIÓN
4.1. Modulo Adquisición Analógica
La placa de adquisición analógica se diseña teniendo 2 planos de potencia aislados eléctricamente: un plano flotante para el componente analógico del circuito y un plano común para conexión con el módulo concentrador de adquisición. La selección de componentes, su disposición sobre el circuito impreso y el diseño de los trazados se realizó de tal forma que mantuviese un voltaje de ruptura de 2KV entre los terminales de entrada de señal analógica y las terminales de alimentación y control digital. En la Fig. 4 puede evidenciarse el diseño 3D de la placa y su implementación final.
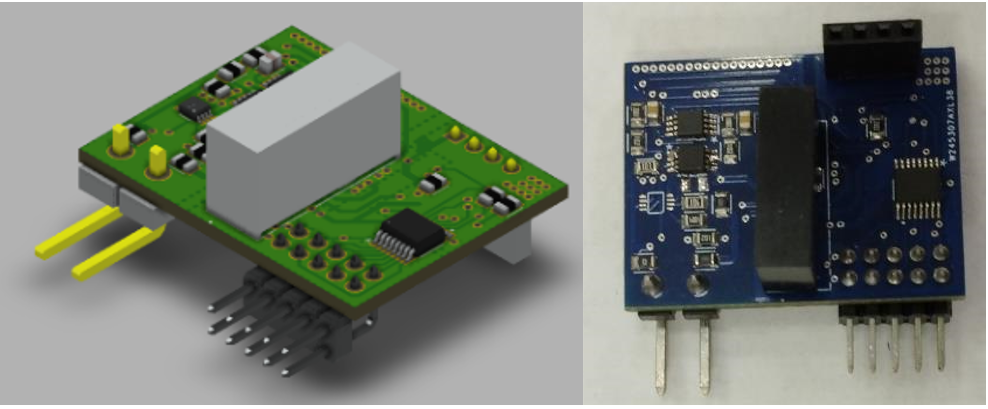
Fig. 4. Tarjeta de adquisición analógica.
Fuente: elaboración propia.
4.2. Modulo Concentrador de Adquisición
El circuito impreso fue diseñado sectorizando relés, placas de adquisición, entradas y salidas digitales, microcontrolador y componentes de regulación. En la parte derecha del diseño se encuentran los componentes relacionados con la adquisición de señales, la izquierda con la entrada de alimentación y regulación de potencia y en el centro los componentes asociados a control digital. Esta disposición de componentes se hace de tal forma que permita el fácil reemplazo de alguno de los componentes y para aislar arcos eléctricos generados por sobretensiones. Se adoptan también medidas para reducir los efectos de arcos eléctricos y salvaguardas para minimizar potenciales cortocircuitos. En la Fig. 5 se observa el diseño 3D de la placa y su implementación final.
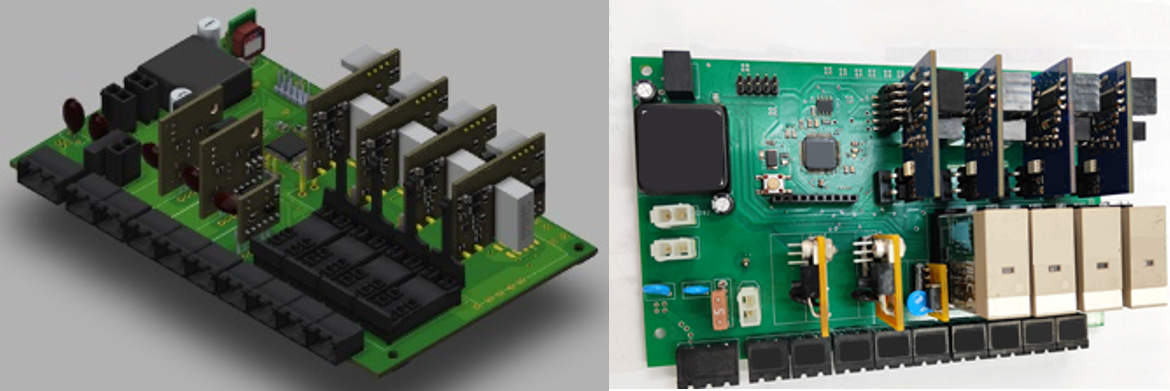
Fig. 5. Tarjeta Concentradora de adquisición.
Fuente: elaboración propia.
4.3. Controlador Principal
El diseño de este módulo es mayormente digital, salvo la adecuación que se hace al receptor de señal proveniente de la antena del receptor GNSS. Debido a que buena parte de las protecciones eléctricas se encuentran en módulos anteriores, las protecciones eléctricas se limitan a TVS menores.
5. INTEGRACIÓN
5.1. Pruebas de Integración
Los diferentes módulos del equipo son programados e interconectados para probar las características funcionales y operacionales del dispositivo completo. Durante el desarrollo del código se tuvo en cuenta el requerimiento de modularidad, el cual dicta que un módulo inferior o esclavo no debe impactar en el desempeño de módulos superiores o similares, razón por la cual se adoptaron las salvaguardas necesarias.
A modo global se comprueba compatibilidad en protocolos de comunicación, la no interferencia ante fallos inducidos en uno o más módulos y la estabilidad del módulo principal ante fallos parciales o totales de la placa de concentradora de adquisición y de las placas de adquisición analógicas.
5.2. Ciclado y Sincronización
A nivel de laboratorio, la sincronía entre equipos se evalúa inicialmente verificando la estabilidad de la señal PPS y sincronía entre UMRs. Los resultados obtenidos, una vez el receptor GNNS obtuviese hora con un número mayor a 5 satélites, mostraron desviaciones entre pulsos no mayores a 2uS en el caso de equipos con antenas iguales y 15uS para antenas con una diferencia en longitud de 5 metros. Para la generación de la señal de control del actuador, se determina que las desviaciones se encuentran en el orden de 15 y 25uS para señales con periodo entre 1 y 10 segundos.
La sincronización con interruptores y UMRs comerciales se logró dejando una variable adicional para control del desplazamiento de la señal con respecto al PPS con una resolución de milisegundos.
En campo, sobre URPCs conectados a sistemas de PC reales, se lograron obtener señales de sincronía en órdenes de menos de 1mS para señales con periodos menores a 10 segundos.
5.3. Adquisición de Señales Analógicas
Se realizan pruebas de adquisición para señales con impedancia de salida entre 10 y 10kOhms, bajo las cuales no se observa atenuación ni alteración de las señales una vez conectadas a las tarjetas de adecuación analógica, ya estén encendidas o desenergizadas. En la prueba de medición de cortocircuito es verificada una medición de cero con un error de 1 cifra significativa para todas las escalas, mientras con señales inyectadas se observó una desviación máxima de 10 cifras significativas, parcialmente atribuidas a la linealidad del circuito de adquisición analógico.
5.4. Modbus y Adecuación MQTT
El equipo se comunica por defecto un protocolo Modbus serial por un canal UART con lógica digital de 3.3V, la cual fue proyectada para conexión con un transductor RS-232, RS-485 o similar para ofrecer conectividad de forma local. Las pruebas de comunicación se realizaron conectando el equipo a un PC con un aplicativo Modbus que permitió probar los diferentes comandos y respuesta de la máquina para validar que se cumplieran los requerimientos del estándar.
En vista que Modbus no es un protocolo de comunicación adecuado para conectividad IoT, ya que es un protocolo tipo maestro esclavo con restricciones en latencia, se hace uso de un adaptador Modbus-MQTT. Este adaptador periódicamente consulta todos los registros del equipo UMR, codifica la información en CBOR y encripta el mensaje para transmitirlo a un tópico a un bróker. El adaptador además comunica periódicamente a otro tópico parámetros operativos asociados al desempeño del mismo, como reintentos de transmisión, tramas transmitidas, consultas Modbus fallidas, entre otros.
Para la recepción de comandos se tienen otros 2 tópicos, uno para configuración del adaptador y otro para configuración de los registros Modbus de la UMR. La configuración de los parámetros se puede hacer de forma individual o en grupo, indicando el número de registro y nuevo valor.
5.5. Captura de Datos y Visualización
El proceso de geolocalización de los dispositivos se llevó a cabo mediante el uso de una librería JavaScript de código abierto que facilita la creación de mapas interactivos en la web con diversas funcionalidades y opciones de personalización. Además, se empleó el formato GeoJSON, que es un estándar abierto para codificar estructuras de datos geográficos sencillos y sus atributos no espaciales, basándose en la notación de objetos JavaScript (JSON). Esta geolocalización se puede observar en la fig. 6.
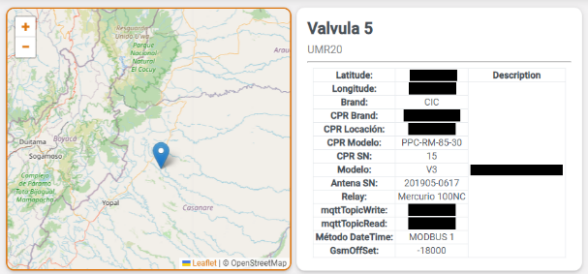
Fig. 6. Dispositivo mostrado en la plataforma.
Fuente: elaboración propia.
La plataforma web tiene como objetivo mostrar los datos recogidos por las diferentes variables de monitoreo en tiempo real, mediante gráficos que permiten observar la evolución y el comportamiento de las variables medidas. Para lograr esta integración, se utilizaron las siguientes tecnologías y herramientas:
- Una base de datos dinámica que almacena los datos enviados por los sensores de forma rápida y eficiente.
- Un servidor web que se encarga de recibir los datos del broker MQTT y decodificarlo de CBOR para su posterior tratamiento y manipulación en formato JSON.
- Una librería JavaScript que facilita la creación y actualización de los gráficos de línea en la interfaz web, utilizando el elemento canvas de HTML5.
- Protocolo de comunicación bidireccional que permite el intercambio de datos en tiempo real entre el servidor y el broker, sin necesidad de recargar la página.
Con esta plataforma web se consigue ofrecer una visualización dinámica e interactiva de los datos en tiempo real, lo que puede resultar útil para el análisis, el monitoreo y la toma de decisiones, además de la posibilidad de realizar configuración de diferentes parámetros de forma remota. Dicha visualización se puede observar en la fig. 7. Un ejemplo de configuración de forma remota desde la plataforma se puede observar en la fig. 8.

Fig. 7. Datos durante un día de Voltaje AC de un equipo mostrado en la plataforma.
Fuente: elaboración propia.

Fig. 8. Configuración de dispositivos desde la plataforma.
Fuente: elaboración propia.
Mapled se proyecta como una plataforma que facilita la gestión y el monitoreo, con un enfoque al internet industrial de las cosas (IIoT). Los dispositivos conectados pueden ser de diversos tipos y comunicarse mediante distintos protocolos de comunicación. La plataforma ofrece una solución flexible y personalizable que permite configurar y vincular cada dispositivo con sus características específicas, lo que la hace especialmente atractiva para usuarios donde su modelo de negocio requiera escalar sus diferentes componentes de forma independiente y flexible, según las necesidades. Un ejemplo de personalización de dispositivos se muestra en la fig. 9, en la que se ingresan los datos para una nueva UMR.
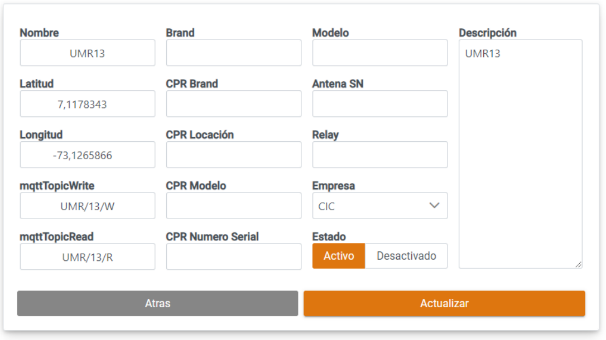
Fig. 9. Configuración de UMR conectada a una URPC en la plataforma.
Fuente: elaboración propia.
5.6. Implementación en Campo
Finalmente, se realiza la implementación del equipo en un entorno real, en el cual se realiza una conexión completa con el rectificador de protección catódica y se transmiten los datos por medio de red GPRS y/o LTE hacia la plataforma Mapled. Un ejemplo de esta implementación se puede observar en la Fig.10.

Fig. 10. UMR Implementada sobre rectificador de protección catódica.
Fuente: elaboración propia.
6. CONCLUSIONES
Este trabajo abarca las diferentes etapas del desarrollo de una solución tecnológica enfocado al monitoreo de SPC, el cual culmina en la implementación de un producto con enfoque a aplicaciones industriales: levantamiento de requerimientos apoyados en especialistas del área, evaluación y planteamiento de diseños Hardware, Firmware y Software, implementación, integración y validación tanto a nivel de laboratorio como en ambiente industrial constituyen parte de este documento. Adicionalmente, es importante destacar que los datos recopilados por el equipo de monitoreo se presentan en una plataforma especialmente diseñada para este propósito. Esta plataforma proporciona una interfaz intuitiva y herramientas de análisis que permiten a los usuarios visualizar y comprender de manera efectiva la información recopilada, lo que facilita la toma de decisiones informadas en entornos industriales, así como el control del ciclado y alarmas de la UMR.
RECONOCIMIENTO
Agradecemos a la Corporación para la investigación de la Corrosión por financiar el desarrollo de productos electrónicos, a su director, Doctor Jorge Hernando Panqueva, por apostar en la formación de personal y promover los espacios para la apropiación de tecnologías e innovación y a los diferentes funcionarios que hacen parte de ella, los cuales han aportado, técnica y emocionalmente el desarrollo de nuestro grupo de trabajo.
REFERENCIAS
[1] H. A. Garnica, E. D. V. Niño y V. D. Zhabon, «Tecnología del plasma aplicada a problemáticas en el sector hidrocarburos en colombia,» ITECKNE: Innovación e Investigación en Ingeniería, vol. 8, nº 1, pp. 37-41, 2011.
[2] A. Méndez Pérez, «Protección catódica: ánodos de sacrificio,» 2016.
[3] J. d. R. Torres Hérnandez, E. D. A. Meraz y L. Veleva, «Evaluación de un sistema de protección catódica de un gasoducto enterrado,» Revista Latinoamericana de Metalurgia y Materiales, vol. 37, nº 1, pp. 19-26, 2017.
[4] G. Neglia Ortiz y R. Rojas Fuentes, Proyecto de instalación de un sistema de protección catódica en tanques de almacenamiento, Universidad Nacional de Ingeniería, 1980.
[5] P. R. Muglisa Pachacama y L. F. Cajas Celorio, Elaboración del procedimiento para la certificación de tanques atmosféricos para almacenamiento de crudo, Quito: EPN, 2007.
[6] M. Irannejad y M. Iraninejad, «Remote monitoring of oil pipelines cathodic protection system via GSM and its application to SCADA system,» International Journal of Science and Research (IJSR), vol. 3, nº 5, pp. 1619-1622, 2014.
[7] A. A. a. V. J. M. León Chacón y L. A. Prada Ardila, «Dealing with Pipelines with Positive Potentials-A Case of Study,» de NACE CORROSION, NACE, 2017.
[8] J. Lozano, Proceso de aseguramiento para rectificadores de protección catódica en la Corporación para a Investigación de la Corrosión, 2004: Universidad Pontificia Bolivariana seccional Bucaramanga, Bucaramanga.
[9] F. Ferraris, M. Parvis, E. Angelini y S. Grassini, «Measuring system for enhanced cathodic corrosion protection,» de 2012 IEEE International Instrumentation and Measurement Technology Conference Proceedings, IEEE, 2012, pp. 1583-1587.
[10] NACE, SP0169-2013 (formerly RP0169), "Control of External Corrosion on Underground or Submerged Metallic Piping Systems", NACE Standards, 2013.
[11] A. W. Peabody, Peabody's control of pipeline corrosion, NACE international, 2001.
[12] H. L. Wang, H. L. Liu, X. J. Yang y F. Liu, «Long distance pipeline cathodic protection test system based on GSM,» Advanced Materials Research, vol. 490, pp. 288-291, 2012.
[13] N. H. Abdulwahab, A. A. Abed y M. A. Jaber, «Instrumentation in cathodic protection systems: field survey,» International Journal of Computer Applications, vol. 975, p. 8887, 2018.
[14] N. H. Abdulwahab, A. A. Abed y M. A. Jaber, «Real-time remote monitoring and control system for underground pipelines.,» International Journal of Electrical \& Computer Engineering (2088-8708), vol. 12, nº 5, 2022.
[15] E. N. Aba, O. A. Olugboji, A. Nasir, M. Olutoye y O. Adedipe, «Petroleum pipeline monitoring using an internet of things (IoT) platform,» SN Applied Sciences, vol. 3, pp. 1-12, 2021.
[16] K. Yang, B. Zhang, J. Zhang y J. Zhu, «Design of remote control inverter based on MQTT communication protocol,» de 2021 IEEE International Conference on Mechatronics and Automation (ICMA), IEEE, 2021, pp. 1374-1378.
[17] E. E. Roussineau, J. L. Matus, P. Cossutta y M. P. Aguirre, «Protección contra descargas atmosféricas en sistemas de monitoreo de campo,» Ingenieria electrica, pp. 86-97, 2017.
[18] M. M. Frydenlund, Lightning protection for people and property, Springer Science \& Business Media, 2012.
[19] D. G. E. Alejandro y S. L. C. Adrian, Diseño de sistema con supresores de sobretensiones en los centros de datos de telecomunicaciones aplicando las Normativas Internacionales, Universidad De Guayaquil. Facultad De Ciencias Matemáticas Y Físicas, 2017.
[20] G. R. Pena y N. R. Barraza, «Tiempo medio entre fallas: investigación de confiabilidad de proyectos ágiles y estudio comparativo de modelos,» de XXI Simposio Argentino de Ingeniería de Software (ASSE 2020)-JAIIO 49 (Modalidad virtual), 2020.
 1,
MSc. Guillermo Alexander Acevedo Hernandez
1,
MSc. Guillermo Alexander Acevedo Hernandez