Diseño ergonómico de una prótesis biónica para miembro superior controlada por señales electromiográficas
Ergonomic design of a bionic upper-limp prosthesis controlled by electromyographic signals
Resumen: Este articulo presenta el diseño de una prótesis biónica para miembro superior basado en medidas antropométricas y controlada por señales electromiográficas. La prótesis está diseñada con el objetivo de proporcionar a los usuarios la capacidad de realizar agarres tanto cilíndricos como en forma de pinza, con el fin de contribuir a la reintegración de personas con discapacidad en sus miembros superiores a la vida social y tratar de buscar una independencia total. El diseño mecánico del prototipo se llevó a cabo utilizando el software de Autodesk Fusion 360. El diseño se basó en un enfoque detallado, teniendo en cuenta las necesidades específicas de los usuarios y las características que permitirían un funcionamiento óptimo de la prótesis de bajo coste. Se incorporaron componentes mecánicos, como articulaciones y los sistemas de agarre mencionados previamente, lo que brinda a los usuarios una versatilidad al interactuar con diversos objetos. Como resultado se obtuvo que la prótesis diseñada no supera el 10% de las dimensiones de una mano humana. Finalmente, se presenta la validación del prototipo impreso en 3D utilizando plástico PLA con los dos agarres mencionados y controlados a través de eventos bioeléctricos, utilizando señales EMG.
Palabras clave: Prótesis biónica, Análisis estructural, Autodesk Fusión 360, Señales EMG, Diseño antropométrico.
Abstract: This paper presents the design of a bionic prosthesis for the upper limb based on anthropometric measurements and controlled by electromyographic signals. The prosthesis is designed to provide users with the ability to perform cylindrical and pincer-shaped grips to contribute to the reintegration of people with disabilities in their upper limbs into social life and try to find total independence. The mechanical design of the prototype was carried out using Autodesk Fusion 360 software. The design was based on a detailed approach, taking into account the specific needs of the users and the characteristics that would allow optimal functioning of the low-cost prosthesis. Mechanical components, such as joints and the previously mentioned gripping systems, are incorporated, giving users versatility when interacting with various objects. As a result, it was obtained that the designed prosthesis does not exceed 10% of the dimensions of a human hand. Finally, the validation of the 3D printed prototype using PLA plastic with the two grips mentioned above and controlled through bioelectric events using EMG signals is presented.
Keywords: Bionic hand, Structural analysis, Autodesk Fusion 360, EMG signals, anthropometric design.
1. INTRODUCCIÓN
En la sociedad actual, las personas con discapacidad física conforman un grupo significativo y diverso. El término discapacidad física según la definición del Ministerio de Salud abarca aquellos individuos que experimentan limitaciones en su movilidad y enfrentan obstáculos para cambiar o mantener una posición corporal, así como para manipular objetos de manera autónoma e independiente.
La pérdida de una mano puede ser devastadora y difícil, las limitaciones funcionales después del suceso son traumáticas, provocando disvascularidad y neoplasia (crecimiento descontrolado de células o tejidos anormales en el organismo)
. Según el Departamento Administrativo Nacional de Estadística (DANE) se ha identificado un número significativo de personas en el municipio de Pamplona, Norte de Santander, que no reciben servicios de rehabilitación. En la Tabla 1, se observa que de un total de 1101 personas, 526 indican que la falta de dinero es la razón por la cual no acceden a los servicios de rehabilitación
. Por otra parte, como se menciona en
, los hombres son significativamente más propensos que las mujeres de perder las manos con un 67% de la parte superior de los miembros amputados. Las amputaciones de miembros superiores son las más comunes durante años laborales productivos con un 60% que oscila entre los 16 y 54 años.
Tabla 1: Población con registro para la localización y caracterización de las personas con discapacidad
| Razón por la cual no recibe servicios de rehabilitación |
Total |
| Total |
Hombres |
Mujeres |
| Total |
1101 |
507 |
594 |
| Ya terminó la rehabilitación |
61 |
30 |
31 |
| Cree que ya no lo necesita |
60 |
32 |
28 |
| No le gusta |
61 |
29 |
32 |
| Falta de dinero |
526 |
244 |
282 |
| Lejanía del centro de atención |
27 |
9 |
18 |
| No hay quien lo lleve |
37 |
13 |
24 |
| No sabe |
266 |
124 |
142 |
| Sin Información |
63 |
26 |
37 |
A pesar de la existencia de las prótesis en el mercado, su accesibilidad se ve limitada por costos elevados, justificados por los avances tecnológicos. Este panorama ha impulsado la necesidad de proyectos de investigación y desarrollo que se centran en el diseño y la construcción de manos robóticas, lo que resulta en importantes contribuciones en la emulación del comportamiento humano para la manipulación de objetos como se demuestra en
.
La mano humana tiene un alto valor antropométrico, es bastante compleja y tiene 25 grados de libertad (GDL)
, como se ilustra en la Fig. 1.
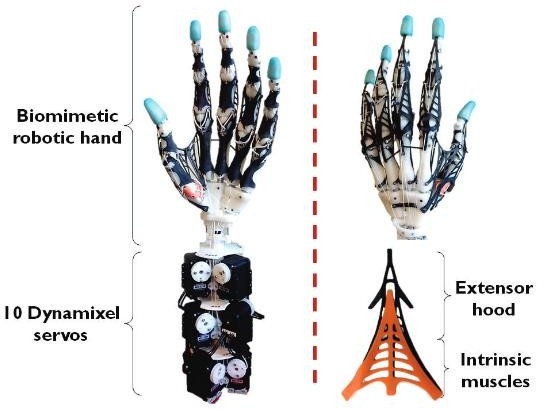
Fig. 1. La mano robótica biomimética.
Fuente: .
Alcanzar el mismo nivel de destreza humana con sistemas robóticos es un desafío que requiere integración de mecanismos, controladores y actuadores complejos en un espacio reducido
,
. Para evaluar el rendimiento de los diseños en manos robóticas, es fundamental proponer una métrica que considere el tipo de agarre que pueden realizar. Dado que existen numerosos trabajos en este campo, se observan diferencias sustanciales en las métricas propuestas, lo que destaca la existencia de oportunidades para futuros estudios y mejoras en este ámbito
,
.
En el diseño de un prototipo de mano robótica es necesario limitar los tipos de agarre según sea la funcionabilidad objetivo, son cuestiones que dependen de las tareas a realizar
. Sin embargo, estudios previos sugieren que los agarres de precisión son favorables para las tareas de interacción
. Hay varios enfoques de diseño, como la inclusión de actuadores en el antebrazo y la transmisión de movimientos a través de tendones
, los motores son directamente acoplados a las articulaciones, como por ejemplo mecanismos de barras, los cuales transmiten el movimiento a través de un perfil curvo
. Por su parte, los mecanismos de dedo que se basan en barras como componentes de accionamiento, los grados de libertad alcanzados en manos con múltiples dedos amplían las posibilidades de controlar el tipo de agarre a través de trayectorias definidas. Se requiere para esto dispositivos de transmisión de movimiento para evitar interferencias debido a esta limitación de espacio
.
Otro punto importante que se considera en la literatura de trabajos previos es el uso de electrodos para el movimiento de las prótesis. Un electrodo es un transductor el cual está encargado de convertir la corriente iónica en corriente eléctrica usando un medio no metálico, este dispositivo es el encargado de recuperar el potencial de acción y convertirlo en una señal eléctrica para medirla y procesarla de manera posterior. Este proceso es factible debido a que el tejido cutáneo posee propiedades similares a las de una sustancia electrolítica. Su composición incluye iones libres que permiten que funcione como un conductor
.
Uno de los principales retos en el ámbito del control mioeléctrico consiste en generar señales de control simultáneas y proporcionales para prótesis motorizadas de mano con varios grados de libertad (GDL)
. Las estrategias de control de sistemas mioeléctricos siguen siendo control proporcional tradicional o el interruptor de encendido y apagado utilizando señales de electromiografía de superficie (EMG),
,
. Las señales biológicas contienen información importante para la comprensión de patologías y comportamientos del cuerpo humano; sin embargo, está información no está disponible en la señal obtenida por los electrodos de manera directa
debido al ruido aditivo provocado por los electrodos y el ambiente. Para extraer la información relevante de esta señal es requerido un procesamiento previo, para ello se utilizan métodos de amplificación y suavizado de señales
,
.
Las prótesis mioeléctricas son controladas por un dispositivo externo que sintetiza las señales y las envía a la tarjeta de control. Actualmente, son considerados los dispositivos de rehabilitación más avanzados, ya que no necesitan de arneses o medios de suspensión
. Con el avance de la tecnología digital, se vuelve más conveniente el análisis y procesamiento de bioseñales en formato digital
. Para lograrlo, es necesario convertir la señal analógica a una forma numérica mediante un convertidor analógico-digital.
Este artículo se centra en el diseño de un prototipo de una mano robótica, destinada a satisfacer las necesidades de usuarios con discapacidades físicas, ofreciendo dos tipos de agarres para mejorar su calidad de vida. El diseño se fundamenta en la emulación de la compleja mano humana. Además de abordar aspectos como la elección de materiales y componentes para el diseño, se realiza el análisis estático de la mano robótica, la implementación de circuitos y el filtrado de señales. Se detalla el proceso de conexión de los electrodos a un conversor analógico-digital y la configuración de filtros para el procesamiento de señales EMG. Se considera que estos elementos son fundamentales para la funcionalidad y precisión del dispositivo, permitiendo una interpretación más precisa de las señales mioeléctricas y una mayor efectividad en la manipulación. Finalmente, se contempla trabajo futuro la implementación independiente de cada dedo para mejorar aún más la precisión en la manipulación y adaptar la prótesis a las necesidades específicas de los usuarios.
2. DISEÑO DE LA PRÓTESIS BIÓNICA
En esta sección se describe el proceso de diseño que da como resultado la representación en tercera dimensión del prototipo de la mano robótica.
2.1 Condiciones preliminares
La mano robótica propuesta es un prototipo que utiliza un mecanismo de cuatro eslabones conectados para el movimiento de cada dedo. Este sistema mecánico consta de tres falanges en cada dedo (meñique, anular y medio), excepto en el pulgar. Estas falanges se integran de manera continua permitiendo así el movimiento simultáneo de estos dedos. Este diseño permite varios tipos de agarre, destacando el “pinch and grasp”. Este tipo de agarre permite al usuario manipular objetos utilizando dos dedos de manera similar a la acción de pellizco y sujeción de la mano humana, los cuales son ilustrados en la Fig. 2 y la Fig. 3.

Fig. 2. Agarre tipo pellizco.
Fuente: Elaboración propia.
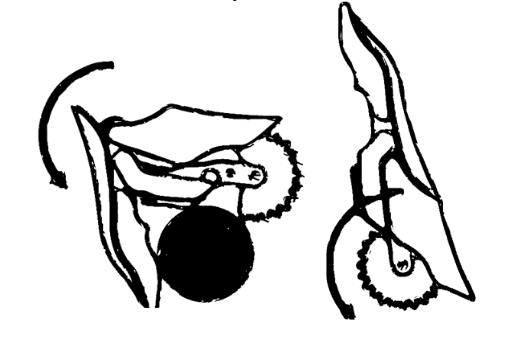
Fig. 3. Agarre tipo sujeción de objetos.
Fuente: Elaboración propia.
Para el diseño del prototipo, se utilizan servomotores MG996 de alto torque, junto con dos servomotores MG90s para controlar el movimiento del dedo índice, pulgar y los demás dedos restantes de manera conjunta. Estos servomotores fueron elegidos debido a que su tamaño y peso son adecuados para la aplicación requerida. Además, se instaló un capacitor cerámico de 1nF en cada actuador para prevenir posibles sobrecargas en estos.
2.2 Diseño del dedo medio, anular y meñique
Para el diseño de un mecanismo rígido se tomó la decisión entre las diferentes formas de mecanismos de actuación y transmisión de movimiento para mover las articulaciones robóticas. Se decide implementar un mecanismo para los dedos con transmisión rígida. El dedo índice requiere un actuador para ser activado, al igual que el pulgar, caso contrario con los dedos restantes, anular, índice y meñique los cuales son accionados por un servomotor donde la transmisión de movimiento viene desde el meñique.
La medida entre la parte superior e inferior de los dedos medio, anular y meñique equivale a 24.90mm para que tenga cierta similitud con el dedo humano como se muestra en la Fig. 4.
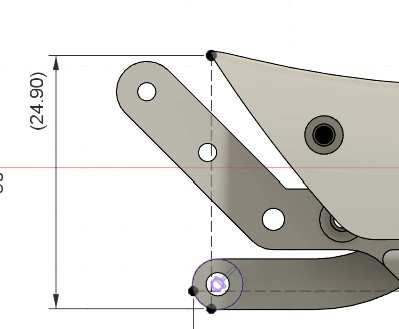
Fig. 4. Altura del dedo medio, anular y meñique.
Fuente: Elaboración propia.
La distancia del dedo medio, anular y meñique es exactamente la misma como se muestra en la Fig. 5, tratando de ser lo más similar a un dedo humano, esto se muestra en la Fig. 6, donde se hace la comparación de una mano humana escaneada y un dedo diseñado.
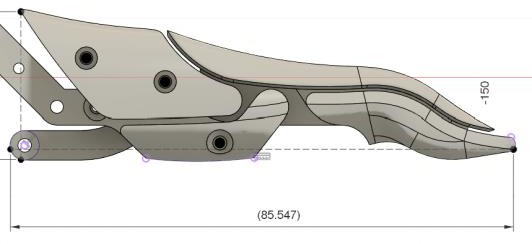
Fig. 5. Largo del dedo medio, anular y meñique.
Fuente: Elaboración propia.

Fig. 6. Escaneo 3D de un mano humana y dedo medio, anular y meñique.
Fuente: Elaboración propia.
2.3 Transmisión de movimiento para el dedo índice
En el diseño del dedo índice la transmisión de movimiento se hace de forma directa mediante un engranaje acoplado al dedo y un engranaje que está en el servomotor MG996, esto se muestra en la Fig. 7 y la Fig. 8.
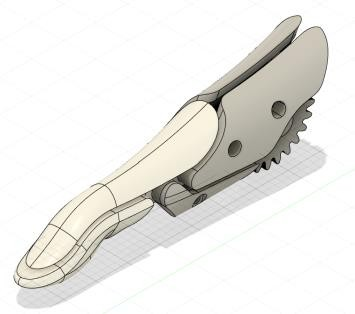
Fig. 7. Diseño 3D del dedo índice.
Fuente: Elaboración propia.
El dedo índice se compone de un total de siete piezas como se observa en la Fig. 8, las piezas 1, 2, 3 y 7 son semejantes a las que conforman los dedos medio, anular y meñique. La pieza 4 cierra y asegura el mecanismo para que la pieza 6 que presenta un agujero central asegure la posición adecuada del dedo. Finalmente, la pieza 5 presenta un engranaje compuesto por veintiséis dientes que es el que recibe el movimiento proveniente del servomotor para garantizar el movimiento.
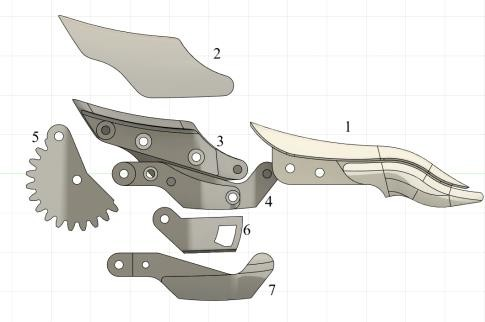
Fig. 8. Numeración de piezas que componen el dedo índice.
Fuente: Elaboración propia.
2.4 Transmisión de movimiento de los dedos medio, anular y meñique
El mecanismo articulado de los dedos medio, anular y meñique se encuentra interconectado mediante dos diminutos eslabones. Estos eslabones facilitan la transmisión fluida de movimiento desde el servomotor, como se muestra en la Fig. 9, posibilitando un funcionamiento coordinado y preciso de los dedos.
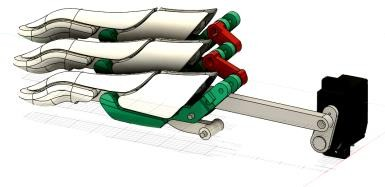
Fig. 9. Vista Lateral derecha de la transmisión de movimiento de los dedos meñique, anular y medio.
Fuente: Elaboración propia.
La transmisión del dedo índice se logra mediante dos engranajes: uno ubicado en el servomotor, con 26 dientes, y otro en el dedo índice. Esto se evidencia en la Fig. 10 y la Fig. 11.
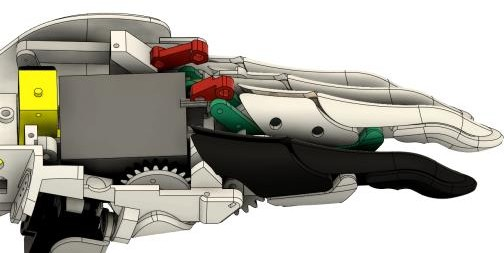
Fig. 10. Transmisión de movimiento del dedo índice.
Fuente: Elaboración propia.

Fig. 11. Mecanismo dedo índice.
Fuente: Elaboración propia.
3. ANÁLISIS ESTRUCTURAL
Esta mano se compone de varios materiales, principalmente ácido poliláctico (PLA). En la Tabla 2 se presentan las propiedades del plástico PLA utilizada en el diseño del prototipo y que se ingresaron en el software Autodesk Fusion 360 para el análisis estructural. En la Fig. 8, la Fig. 12 y la Fig. 13 se enumeran y se muestran las diferentes piezas, las cuales son utilizados en el prototipo.
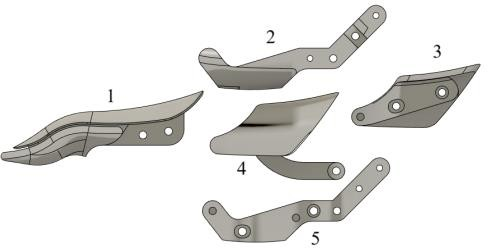
Fig. 12. Numeración de piezas dedo medio, meñique y anular.
Fuente: Elaboración propia.
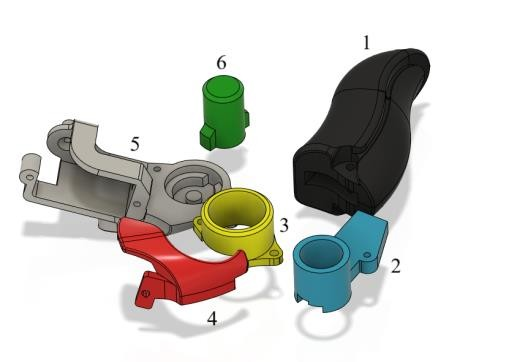
Fig. 13. Numeración de piezas dedo pulgar
Fuente: Elaboración propia.
La Fig. 14 presenta el resultado de las carcasas inferior y superior utilizadas en el diseño.
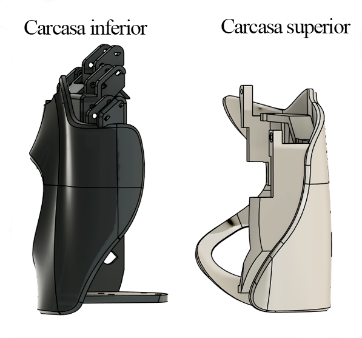
Fig. 14. Carcasas inferior y superior.
Fuente: Elaboración propia.
Con los materiales definidos en el software Autodesk Fusion 360, donde fue diseñada la mano, se realiza un análisis estructural para las piezas 2, 3, 4 y 5 que son las que reciben carga en mayor cantidad al momento de efectuar el agarre tipo sujeción de objetos como se presentó en la Fig. 3. Para esto se calculan las masas de la mano robótica y se presentan en la Tabla 3.
Tabla 2: Propiedades ácido poliláctico
| Plástico PLA |
| Densidad |
1.3 E^03 kg / mm3 |
| Módulo de Young |
3500 MPa |
| Coeficiente de Poisson |
0.39 |
| Límite de elasticidad |
55 MPa |
| Resistencia máxima a tracción |
49 MPa |
| Conductividad térmica |
0.13 W /M °C |
| Temperatura de vitrificación |
(52 – 60) °C |
| Calor específico |
1800 J / (kg °C) |
Fuente: elaboración propia
Tabla 3: descripción
| Componente |
Material |
Cantidad |
Masa (g) |
Parcial de masas (g) |
| Carcasa Superior |
Plástico PLA |
1 |
43.27 |
43.2 |
| Carcasa inferior |
Plástico PLA |
1 |
72.15 |
72.15 |
| Pieza 1 |
Plástico PLA |
3 |
5.71 |
17.13 |
| Pieza 2 |
Plástico PLA |
3 |
1.87 |
5.61 |
| Pieza 3 |
Plástico PLA |
3 |
1.72 |
5.16 |
| Pieza 4 |
Plástico PLA |
3 |
2.68 |
8.04 |
| Pieza 5 |
Plástico PLA |
3 |
1.70 |
5.1 |
| Índice 1 |
Plástico PLA |
1 |
5.41 |
5.41 |
| Índice 2 |
Plástico PLA |
1 |
2.49 |
2.49 |
| Índice 3 |
Plástico PLA |
1 |
2.44 |
2.44 |
| Índice 4 |
Plástico PLA |
1 |
1.31 |
1.31 |
| Índice 5 |
Plástico PLA |
1 |
1.27 |
1.27 |
| Índice 6 |
Plástico PLA |
1 |
0.80 |
0.80 |
| Índice 7 |
Plástico PLA |
1 |
1.32 |
1.32 |
| Pulgar 1 |
Plástico PLA |
1 |
20.44 |
20.44 |
| Pulgar 2 |
Plástico PLA |
1 |
2.10 |
2.10 |
| Pulgar 3 |
Plástico PLA |
1 |
1.29 |
1.29 |
| Pulgar 4 |
Plástico PLA |
1 |
1.92 |
1.92 |
| Pulgar 5 |
Plástico PLA |
1 |
7.26 |
7.26 |
| Pulgar 6 |
Plástico PLA |
1 |
1.64 |
1.64 |
| MG90S |
Compuesto |
2 |
13.4 |
26 |
| MG996R |
Compuesto |
1 |
55 |
55 |
| Masa total (g) |
285.5 |
Fuente: elaboración propia
3.1 Análisis del conjunto del dedo índice
La Fig. 10 permite observar que el motor ocupará una cantidad de espacio grande y es esencial para el tipo de agarre tipo pellizco. El peso máximo que soporta es 1.5Kg, que al ser multiplicado por la gravedad nos da una fuerza de 14.7N que se pueden ubicar en cada falange proximal del conjunto de dedos sostenidos. Con esta fuerza se desarrolla un análisis estático en Autodesk Fusión 360 para percibir los desplazamientos que sufre físicamente la pieza, el resultado se muestra en la Fig. 15.
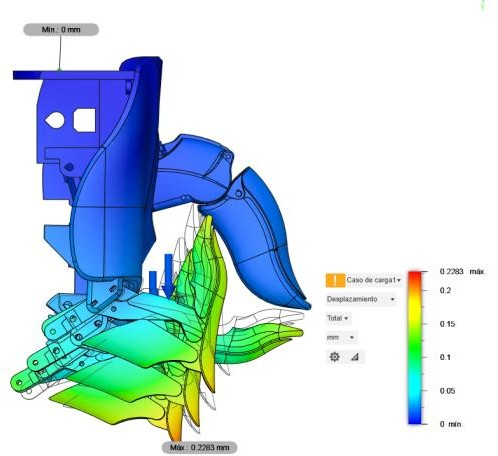
Fig. 15. Análisis de desplazamiento del conjunto de dedos.
Fuente: Elaboración propia.
Aunque el análisis de desplazamiento muestra que la pieza se desplaza parcialmente una distancia de 0.2283mm, no debe causar alarmas, ya que el análisis permite observar donde fallará la pieza ante un peso ideal de 1.5 Kg ya que la composición de las piezas es de PLA.
4. PROCESAMIENTO DE SEÑALES ELECTROMOGRÁFICAS
En esta sección se describe el proceso de filtrado de la señal electromiográfica (EMG) y el diseño del circuito de acondicionamiento para la implementación real del prototipo.
4.1 Conceptos preliminares
Los eventos bioeléctricos desempeñan un papel crucial en el funcionamiento adecuado del cuerpo humano. La capacidad de medir, comprender y analizar estas señales eléctricas ha llevado al desarrollo de dispositivos entre los cuales se destacan el electrocardiógrafo, el electroencefalógrafo y el electromiográfo
.
El corazón, como la máquina principal que impulsa la vida, genera un patrón eléctrico característico con cada latido. El electrocardiógrafo (ECG) capta, registra y amplía la actividad eléctrica del corazón a través de electrodos colocados en las cuatro extremidades y en seis posiciones cerca del tórax. Es una herramienta vital para registrar y analizar esta actividad eléctrica cardíaca
, como se puede observar en la Fig. 16. La señal de ECG está compuesta por diferentes fases, las cuales se identifican mediante las letras P, Q, R, S y T.
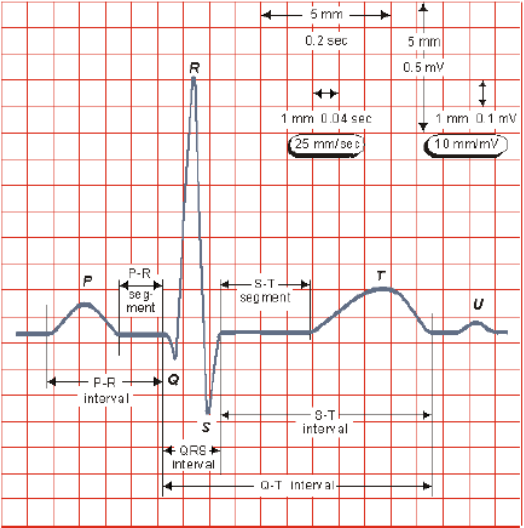
Fig. 16. Mecanismo dedo índice.
Fuente: Elaboración propia.
Por su parte, el cerebro, el órgano supremo del pensamiento y la coordinación, también emite señales eléctricas que pueden ser registradas y analizadas mediante el electroencefalógrafo (EEG). Este dispositivo mide las corrientes eléctricas generadas por células nerviosas en el cerebro, proporcionando una representación gráfica de la actividad cerebral en forma de ondas cerebrales
, como se ilustra la Fig. 17.
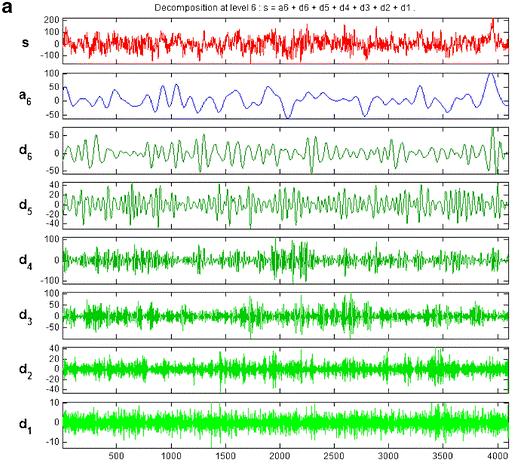
Fig. 17. Electroencefalograma (EEG)
Fuente: .
Por otra parte, la electromiografía es responsable del movimiento y la función motora, también generan señales eléctricas que pueden ser capturadas y analizadas mediante el electromiográfo (EMG)
. Este dispositivo registra la actividad eléctrica de los músculos durante la contracción y el relajamiento, proporcionando información sobre la función y la actividad musculares como se evidencia en la Fig. 18.
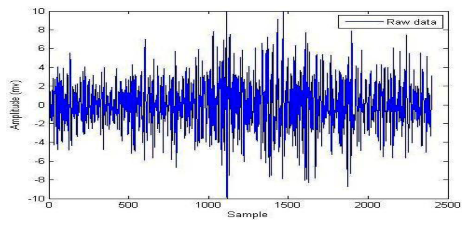
Fig. 18. Electromiografía (EMG).
Fuente: .
En la Tabla 4 se observan los diferentes valores típicos de las señales bioeléctricas presentes en el cuerpo tomadas de diferentes trabajos de investigación
.
Tabla 4: Valores típicos de las señales bioeléctricas.
| Lugar |
Nombre del registro |
Amplitud |
Ancho de Banda [Hz] |
| Células |
Electrograma (EG) |
50 – 100 mV |
DC 1000 - 10000 |
| Corazón |
Electrocardiograma (ECG) |
2 – 3 mV |
0.05 – 250 |
| Cerebro |
Electroencefalograma (EEG) |
5 – 300 μV |
0.1 – 100 |
| Músculo |
Electromiograma (EMG) |
0.1 – 5 mV |
50 – 5000 |
| Ojo |
Electrooculograma (EOG) |
50 μV – 350 mV |
0.1 – 10 |
| Estómago |
Electrogastrograma (EGG) |
10 – 1000 mV |
DC – 1 |
Existen diferentes tipos de electrodos, primero encontramos los electrodos superficiales los cuales son los que se adhieren a la piel con un gel conductor y capturan señales eléctricas para evaluar la función neuromuscular o cerebral; mientras que los electrodos percutáneos se insertan directamente a través de la piel para obtener lecturas precisas en técnicas como la electromiografía.
En esta investigación se empleó el método de electrodos superficiales con gel conductor permitiendo la captura de las señales EMG
. En la captura de las señales mioeléctricas o electromiográficas se obtiene una señal en crudo la cual es compleja de manipular e interpretar, como se representa en la Fig. 19.
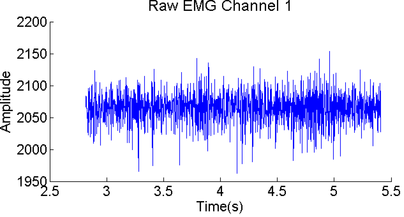
Fig. 19. Canal 1 EMG sin procesar.
Fuente: Elaboración propia.
4.2 Filtrado de la señal
Se utilizaron distintos filtros para procesar las señales EMG. La Tabla 5
detalla la evaluación de cada filtro y se clasifica en dos categorías: ideal o no ideal para la tarea específica. En esta investigación se utilizaron los filtros basados en promedio y pasa bajo media móvil exponencial.
Tabla 5: Filtros empleados para el procesamiento de señales EMG. * Ideal, ** No ideal
| Tipo de filtros |
Prótesis biomimética |
Prótesis biónicas |
| Promediador simple |
** |
* |
| Filtro respuesta al impulso |
* |
* |
| Filtro de media móvil |
** |
* |
| Filtro basado en promedio |
** |
* |
| Filtro pasa bajo media móvil exponencial |
** |
* |
Fuente: elaboración propia
4.3 Metodología para el procesamiento de la señal EMG
Cuando el usuario realiza una contracción muscular al nivel del antebrazo, ya sea presión o flexión
, se genera una señal analógica proveniente del musculo, la cual sigue la metodología presentada en la Fig. 20 para el procesamiento de la señal electromiográfica (EMG).
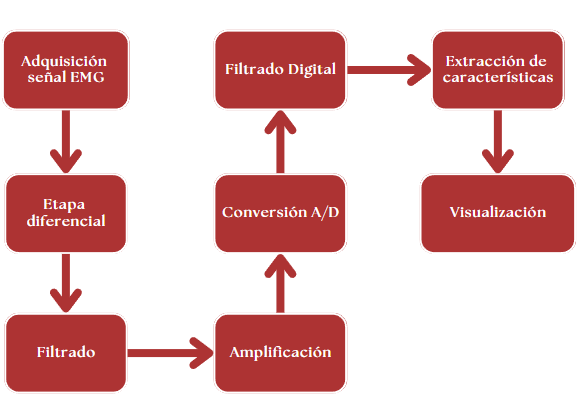
Fig. 20. Metodología señal EMG.
Fuente: Elaboración propia.
El filtro basado en promedio móvil (ecuación (1)) es usado para suavizar datos y reducir el ruido. A diferencia del filtro promediador simple, este filtro asigna pesos variables a los valores pasados y presentes, dando mayor importancia a los datos recientes. Esto permite una adaptación más rápida a los cambios en la señal, proporcionando una salida más suave y estabilizada
, podemos observar cómo es el comportamiento de la variable en la ecuación (1), donde y[n] es la señal filtrada, M el número de muestras, n el iterador y k una constante.
\[ y[n] = \frac{1}{M} \sum_{i=0}^{M-1} x[n-k] \hspace{1cm} (1)\]
Para el segundo filtro (ecuación (2)) se programó el filtro pasa baja media móvil exponencial, el cual es un filtro donde se le asignan pesos variables a los datos pasados y presentes, dándoles mayor importancia a las observaciones más recientes
. A diferencia de media móvil simple, donde todos los datos tienen el mismo peso.
\[ S(t) = \begin{cases} Y(0) & \text{si } t = 0, \\ \alpha Y(t) + (1-\alpha) S(t-1) & \text{si } t > 0 \end{cases} \hspace{1cm} (2)\]
donde S(t) es la señal filtrada, α es un factor que va de 0 a 1, Y(t) es el dato leído en ese instante y S(t-1) es el dato en el tiempo anterior.
En la Fig. 21 se observa el comportamiento de la señal en bruto y los filtros mencionados anteriormente.
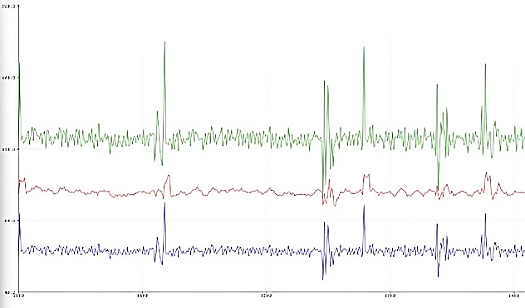
Fig. 21. Señales EMG procesadas. Color verde (señal en bruto), Color rojo (señal con filtro basado en promedio) y Color azul (señal con filtro pasa baja de media móvil exponencial).
Fuente: Elaboración propia.
4.4 Circuito de acondicionamiento de la señal para el sistema en tiempo real
Los tres electrodos se conectan directamente a los terminales del conversor analógico digital (ADC). Dos de los electrodos se conectaron a dos canales diferenciales, mientras que el ultimo se conectó a tierra. Luego, se configuró el ADC a una resolución de 24 bits y se programaron los diferentes filtros definidos en la ecuación (1) y la ecuación (2).
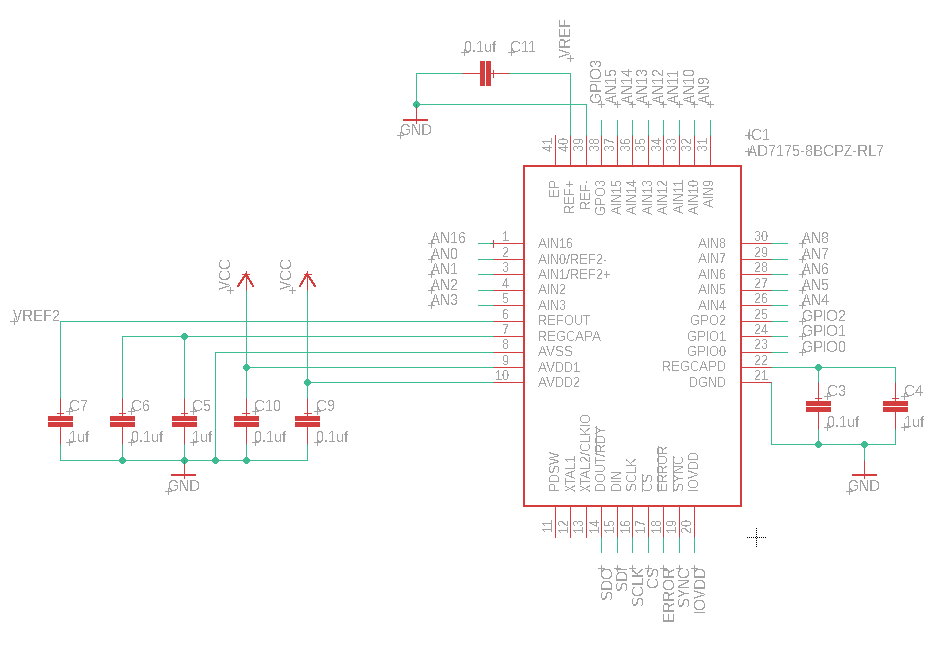
Fig. 22. Circuito del conversor analógico digital.
Fuente: Elaboración propia.
5. RESULTADOS Y DISCUSIONES
La implementación de los conceptos descritos en la sección 2, 3 y 4 resulta en el prototipo de la prótesis transradial, el cual se muestra en la Fig. 23. El prototipo tiene una dimensión total de aproximadamente 350 mm, que incluye el socket de soporte para exhibición con medidas de 180 mm. Es importante mencionar que los servomotores que activan cada articulación están ubicados en el interior de la palma de la mano, como se presentó en la Fig. 10.

Fig. 23. Imagen del prototipo real y renderizado.
Fuente: Elaboración propia.
En la Fig. 24 (a) se observa un agarre tipo pellizco, mientras que en la Fig. 24 (b) se presenta un agarre tipo sujeción de objetos. Estos dos tipos de agarres pueden ser controlados por señales mioeléctricas detectadas con los electrodos.
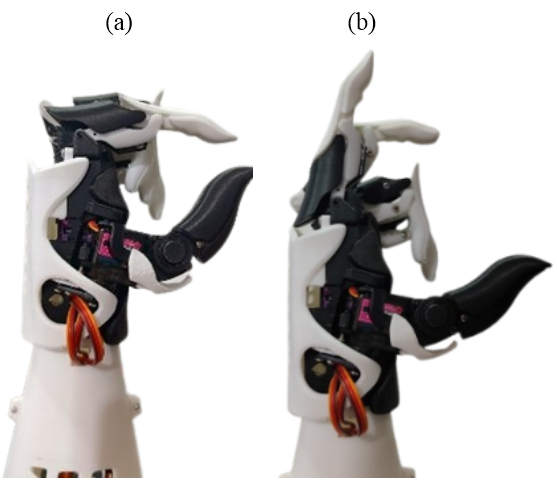
Fig. 24. Ensamble del prototipo (a) Agarre pellizco, (b) Sujeción de objetos.
Fuente: Elaboración propia.
Con la intención de probar la validez del prototipo, se efectuó un experimento en donde un usuario brinda una orden a la prótesis de abrir y cerrar la mano mediante señales mioeléctricas. Los resultados se muestran en las Fig. 25 (a) y la Fig. 25 (b).
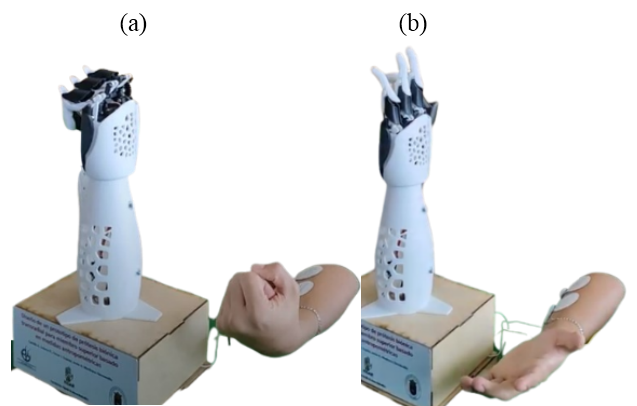
Fig. 25. (a) Usuario con mano cerrada, (b) usuario con dedos extendidos.
Fuente: Elaboración propia.
Para observar el recurso multimedia que evidencia el funcionamiento del prototipo y su comportamiento en tiempo real, consulte
.
Durante las pruebas realizada, se observó que los dedos se abren y cierran de forma natural con este sistema. Así mismo, se identificó un retardo de 0.7 segundos en la señal para abrir y cerrar los dedos; este retraso, se debe al tiempo necesario para que el sensor mioeléctrico elimine el ruido durante la captación de las señales. Además, para respaldar la confiabilidad y validar lo mencionado en la sección 3, se llevó a cabo una prueba práctica con un peso de 2.0 Kg y el prototipo demostró un rendimiento exitoso. Esto refuerza la seguridad y la resistencia de la mano robótica, validando su capacidad para manejar cargas que superan su objetivo de 1.5 Kg.
6. CONCLUSIONES
Este documento presenta el diseño de un prototipo de prótesis biónica para miembro superior, donde involucra una forma de transmisión de movimiento mediante un mecanismo articulado. El uso de ácido poliláctico (PLA) para la construcción del prototipo es básico para prótesis, acotando el uso y las actividades que pueda realizar el usuario.
Se demostró a través del análisis estructural la identificación de posibles fallas por deformación y validación del diseño, permitiendo garantizar que la mano robótica mantenga su funcionalidad y forma durante su uso.
La implementación de filtros, especialmente el filtro basado en promedio y el filtro pasa baja de media móvil exponencial, demostraron ser efectivos en la tarea de filtrar las señales electromiográficas (EMG).
Se logro la implementación del prototipo real, utilizando el diseño presentado y generando el agarre tipo pellizco y de sujeción de objetos.
Como trabajo futuro se desea implementar el accionamiento independiente de cada dedo que permita la manipulación precisa de cada uno de manera individual. De igual forma se plantea desarrollar el prototipo en Nylon (PA) el cual es un material ideal para la producción de prótesis y otras piezas que estarán en contacto con la piel.
REFERENCIAS
[1] National Amputee Statistical Database (NASDAB). The amputee statistical database for the United Kingdom 2006/2007, 2009.
[2] Departamento Administrativo Nacional de Estadística (DANE), Dirección de Censos y Demografía de Pamplona, Norte de Santander, 2010.
[3] A. Sanchez, C. Enrique y E. Aguirre. Diseño de prototipo de prótesis biónica para personas con falta de una de sus extremidades superiores del cuerpo. Repositorio Universidad Estatal de Milagro, 2019.
[4] C. Piazza, G. Grioli, M. Catalano y A. Bicchi, “A century of robotic hands,” Annual Review of Control, Robotics, and Autonomous Systems, vol. 2, pp. 1–32, 2019.
[5] M. Hernando, C. Morillo, D. Guffanti y A. Brunete, “Mechatronic design of a self-contained dexterous robotic hand gestural communication,” International Journal of Social Robotics, pp. 1– 11, 2023.
[6] M. Johannes, J. Bigelow, J. Burck, S. Harshbarger, M. Kozlowski, y T. Van Doren, “An overview of the developmental process for the modular prosthetic limb,” Johns Hopkins APL Technical Digest, vol. 30, pp. 207–216, 2011.
[7] M. Laffranchi, N. Boccardo, S. Traverso, L. Lombardi, M. Canepa, A. Lince, M. Semprini, J. A. Saglia, A. Naceri, R. Sacchetti, et. al., “The Hannes hand prosthesis replicates the key biological properties of the human hand,” Science Robotics, vol. 5, 2020.
[8] A. Bicchi, “Hands for dexterous manipulation and robust grasping: A difficult road toward simplicity,” IEEE Transactions on Robotics and Automation, vol. 16, pp. 652–662, 2000.
[9] F. Cini, V. Ortenzi, P. Corke, y M. Controzzi, “On the choice of grasp type and location when handing over an object,” Science Robotics, vol. 4, 2019.
[10] M. Grebenstein, A. Albu-Schäffer, T Bahls, M. Chalon, O. Eiberger, et. al., “The DLR hand arm system,” en IEEE International Conference on Robotics and Automation, 2011.
[11] C. Xiong, W. Chen, B. Sun, M. Liu, S. Yue, y W. Chen, “Design and implementation of an anthropomorphic hand for replicating human grasping functions,” IEEE Transactions on Robotics, vol. 32, pp. 652–671, 2016.
[12] N. Jarque-Bou, M. Vergara, J. Sancho-Bru, V. Gracia-Ibáñez, y A. Roda-Sales, “Hand kinematics characterization while performing activities of daily living through kinematics reduction,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 28, pp. 1556–1565, 2020.
[13] J. Ning, K. Englehart, y P. Parker. "Extracting simultaneous and proportional neural control information for multiple-DOF prostheses from the surface electromyographic signal." IEEE transactions on Biomedical Engineering vol. 4, pp. 1070-1080, 2008.
[14] F. Anders, et. al. "Control of upper limb prostheses: Terminology and proportional myoelectric control—A review." IEEE Transactions on neural systems and rehabilitation engineering, vol. 10, pp. 663-677, 2012.
[15] J. Uellendahl. "Experience fitting partial hand prostheses using prodigits." Univ. of New Brunswick's MyoElectric Controls/Powered Prosthetics Symp. Proc., 2008.
[16] P. Parker y R. Scott. "Myoelectric control of prostheses." Critical reviews in biomedical engineering vol. 4, pp. 283-310, 1986.
[17] X. Wang, B. Zhang y Y. Yang. “Active SVM-based relevance feedback using multiple classifiers ensemble and features reweighting”. Engineering Applications of Artificial Intelligence, vol. 26, pp. 368-381, 2013.
[18] K. Xing et al. "A real-time EMG pattern recognition method for virtual myoelectric hand control." Neurocomputing, pp. 345-355, 2014.
[19] J. González, “Robótica y prótesis inteligentes”, Revista Digital Universitaria, vol. 6, no. 1 pp. 11–15, 2004.
[20] M. Vorvick, Northwest Division of Physician Assistant Studies, Department of Family Medicine, UW Medicine, School of Medicine, University of Washington.
[21] R. Madou, et al. "Señales bioeléctricas del cuerpo: de la ingeniería electrónica a la performance artística.", Cuerpo, Máquina, Acción, vol. 4, 2020.
[22] J. Lorenzo. "Análisis de señales electrocardiográficas usando técnicas de procesamiento digital", Tesis, 2015.
[23] D. Subha, P. Joseph, U. Acharya, et al. EEG Signal Analysis: A Survey. J Med Syst vol. 34, pp. 195–212, 2010.
[24] J. Chu, I. Moon, Y. Lee, S. Kim, y S. Mun. A supervised feature-projection-based real-time EMG pattern recognition for multifunction myoelectric hand control. IEEE/ASME Trans. Mechatron. Vol. 12, pp. 282–290, 2007.
[25] A. Arché-Núñez, et al. "Bio-potential noise of dry printed electrodes: physiology versus the skin-electrode impedance." Physiological Measurement vol. 9, no. 44, 2023.
[26] S. Avrillon, et al. "Tutorial on MUedit: An open-source software for identifying and analysing the discharge timing of motor units from electromyographic signals." bioRxiv, 2023.
[27] K. Takahashi. "Remarks on emotion recognition from bio-potential signals." 2nd International conference on Autonomous Robots and Agents. Vol. 3. 2004.
[28] A. Oppenheim, R. Schaffer, J. Buck. Discrete-Time Signal Processing. Upper Saddel River, New Jersey: Prentice-Hall, Inc, 1999.
[29] Y. Li, et al. Application of an EMG interference filtering method to dynamic ECGs based on an adaptive wavelet-Wiener filter and adaptive moving average filter. Biomedical Signal Processing and Control, vol. 72, pp. 103-344, 2022.
[30] D. Farina y R. Merletti. "Comparison of algorithms for estimation of EMG variables during voluntary isometric contractions." Journal of Electromyography and Kinesiology, vol. 5, no. 10, 2000.
[31] C. Solano, Prototipo de Prótesis biónica para miembro superior. Olimpiadas de Robótica Cúcuta, Unicentro. Disponible en: https://youtube.com/shorts/CSot08GRxzM?feature=share.
 1,
PhD. Oscar Javier Suarez Sierra
1,
PhD. Oscar Javier Suarez Sierra