Revista Colombiana de
Tecnologías de Avanzada
Tecnologías de Avanzada
Recibido: 03 de abril de 2023
Aceptado: 10 de julio de 2023
Aceptado: 10 de julio de 2023
CONTROL DIFUSO PARA PINZA ROBÓTICA BLANDA ORIENTADA A OBJETOS NO RÍGIDOS
FUZZY CONTROL FOR SOFT ROBOTIC GRIPPER ORIENTED TO NO RIGID AND THING OBJECTS
 PhD. Robinson Jiménez Moreno*, MSc. Javier Eduardo Martínez Baquero**, MSc. Oscar Agudelo Varela**
PhD. Robinson Jiménez Moreno*, MSc. Javier Eduardo Martínez Baquero**, MSc. Oscar Agudelo Varela**
*Universidad Militar Nueva Granada, profesor Facultad de Ingeniería.
Cra. 11 #101-80. Bogotá. Colombia.
Tel.: (+571) 6500000
E-mail: robinson.jimenez@unimilitar.edu.co
**Universidad de los Llanos, Facultad de Ciencias Básicas e Ingeniería.
Km. 12 Vía Puerto López. Villavicencio, Meta. Colombia.
Tel.: (+578) 6616800
E-mail: {jmartinez, oscar.agudelo}@unillanos.edu.co
FUZZY CONTROL FOR SOFT ROBOTIC GRIPPER ORIENTED TO NO RIGID AND THING OBJECTS
PhD. Robinson Jiménez Moreno*, MSc. Javier Eduardo Martínez Baquero**, MSc. Oscar Agudelo Varela**
*Universidad Militar Nueva Granada, profesor Facultad de Ingeniería.
Cra. 11 #101-80. Bogotá. Colombia.
Tel.: (+571) 6500000
E-mail: robinson.jimenez@unimilitar.edu.co
**Universidad de los Llanos, Facultad de Ciencias Básicas e Ingeniería.
Km. 12 Vía Puerto López. Villavicencio, Meta. Colombia.
Tel.: (+578) 6616800
E-mail: {jmartinez, oscar.agudelo}@unillanos.edu.co
Cómo citar: Jiménez Moreno, R., Martínez Baquero, J. E., & Agudelo Varela, O. (2023). CONTROL DIFUSO PARA PINZA ROBÓTICA BLANDA ORIENTADA A OBJETOS NO RÍGIDOS . REVISTA COLOMBIANA DE TECNOLOGIAS DE AVANZADA (RCTA), 2(42), 1–7. https://doi.org/10.24054/rcta.v2i42.2647
Derechos de autor 2023 Revista Colombiana de Tecnologías de Avanzada (RCTA).
Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial 4.0.

Esta obra está bajo una licencia internacional Creative Commons Atribución-NoComercial 4.0.
Resumen: El presente artículo expone el diseño de un efector robótico construido con sensórica interna en material flexible. Basados en el agarre bioinspirado de objetos delgados típicamente no rígidos realizados con dos dedos por os humanos, se establecen las características del modelo 3 que sirve de base para la impresión de este, incluyendo espacio interno para una flexoresistencia que permita identificar el porcentaje de flexión para agarre, mediante el efector. Se diseña un controlador difuso para control del efector y dada la tolerancia del sensor se emplea un sistema de inferencia difusa Mamdani tipo-2. Los resultados muestran un agarre adecuado que permite obtener un error de estado estacionario cercano a cero, permitiendo agarrar objetos delgados como un pañuelo o una pieza de papel higiénico.
Palabras clave: Agarre bio-inspirado, Control difuso, Impresión 3D, Robótica suave.
Abstract: This paper presents the design of a robotic effector built with internal sensors in flexible material. Based on the bio-inspired grasping of thin, typically non-rigid objects made with two fingers by humans, the characteristics of model 3 are established, which serves as the basis for the printing of this model, including internal space for a flex resistance that allows identifying the percentage of flexion for grasping, using the effector. A fuzzy controller is designed to control the effector, and, given the tolerance of the sensor, a Mamdani type-2 fuzzy inference system is used. The results show an adequate grip that allows obtaining a steady state error close to zero, allowing one to grip thin objects such as a handkerchief or toilet paper.
Keywords: Bio-inspired grip, Fuzzy control, 3D Impression, Soft robotics.
Un aspecto adicional al control y que concierne al diseño del efector final es su capacidad de adaptación
Para el agarre de objetos delgados como papel o telas ligeras como pañuelos, no se han encontrado efectores finales que permitan orientar una aplicación asistencial a personas con algún tipo de problema motor para realizar esta tarea por sí mismos. Por ello y dada la tendencia en el estado del arte se propone y presenta el diseño de un efector robótico bioinspirado en el agarre de los dedos, impreso con material flexible e instrumentado con sensórica interna, el cual mediante un control difuso permita el agarre de objetos delgados y livianos tipo papel o pañuelos.
El siguiente documento se divide en cuatro secciones comprendidas en la actual introducción, la sección dos donde se presenta la metodología de diseño del efector y del sistema de control, la sección tres donde se presentan resultados de agarre y finalmente la seccion cuatro donde se exponen las conclusiones alcanzadas.
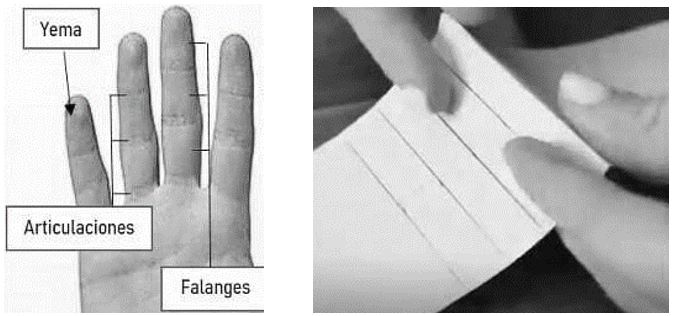
Para este tipo de objetos el proceso de agarre surte de retraer los dedos uno hacia el otro, lo que implica una orientación de un dedo frente al otro. Por lo que el diseño del efector se establece bajo esta replica mediante dos dedos que se enfrenten al retraerse y cada uno implementado con dos falanges y una articulación (ver Figura 1) para cada lado del agarre implicado.
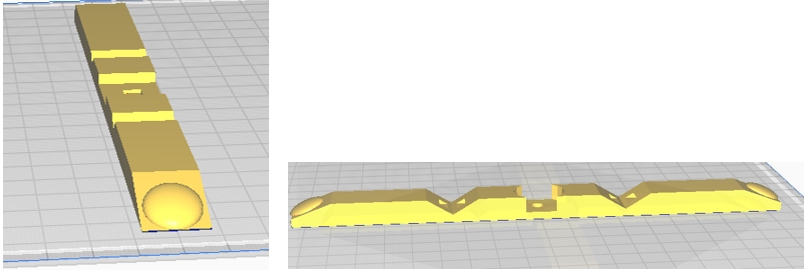
La impresión en TPU permite una estructura no rígida que facilita la retracción del efector, a esta estructura se le realiza una sección hueca trasversal para inserción de un sensor que permita establecer el grado de retracción en la operación de agarre. Pruebas iterativas del diseño permitieron determinar la conveniencia de incluir en el diseño una saliente en el punto de agarre tipo yema.


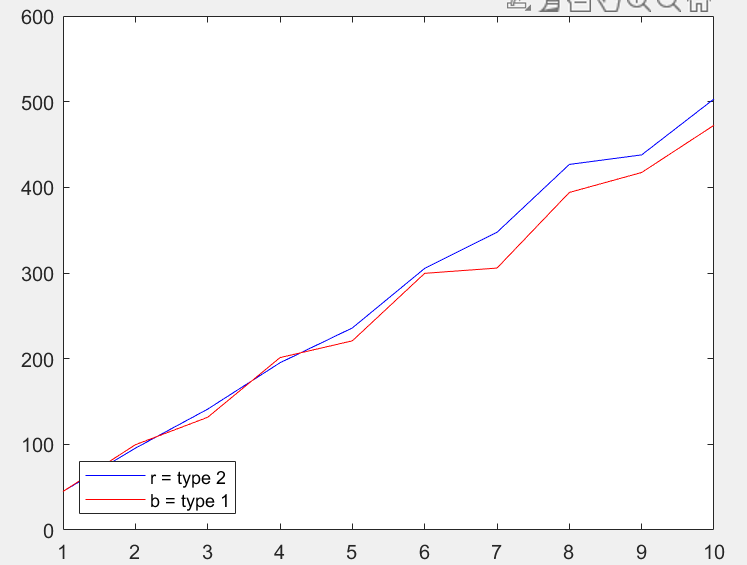
La Figura 11 ilustra la acción de control del sistema de inferencia difusa donde para el caso se emplea la técnica de hardware in the loop (HIL), de forma que la información del sensor llega a la interfaz en simulink (MATLAB®), donde dependiendo del grosor del elemento de agarre se genera mayor acción para aumentar la presión y sostener el objeto.
Los parámetros de diseño y la configuración de la impresión 3D son los elementos de mayor influencia en la construcción del efector, para lo cual se evidenció que es necesario un adecuado prediseño y establecimiento de prerrequisitos que disminuyan las iteraciones tanto en el entorno CAD de diseño como de su impresión.
An, T., Zhu, X., Zhu, M., Ma, B., & Dong, B. (2023). Fuzzy logic nonzero-sum game-based distributed approximated optimal control of modular robot manipulators with human-robot collaboration. Neurocomputing, 543, 126276. https://doi.org/https://doi.org/10.1016/j.neucom.2023.126276
Bi, Z., Liu, Y., Krider, J., Buckland, J., Whiteman, A., Beachy, D., & Smith, J. (2018). Real-time force monitoring of smart grippers for Internet of Things (IoT) applications. Journal of Industrial Information Integration, 11, 19–28. https://doi.org/10.1016/j.jii.2018.02.004
Chen, K., Lou, V. W., & Cheng, C. Y. M. (2023). Intention to use robotic exoskeletons by older people: A fuzzy-set qualitative comparative analysis approach. Computers in Human Behavior, 141, 107610. https://doi.org/https://doi.org/10.1016/j.chb.2022.107610
Dinakaran, V. P., Balasubramaniyan, M. P., Le, Q. H., Alrubaie, A. J., Al-khaykan, A., Muthusamy, S., Panchal, H., Jaber, M. M., Dixit, A. K., & Prakash, C. (2023). A novel multi objective constraints based industrial gripper design with optimized stiffness for object grasping. Robotics and Autonomous Systems, 160, 104303. https://doi.org/https://doi.org/10.1016/j.robot.2022.104303
Dinakaran, V. P., Balasubramaniyan, M. P., Muthusamy, S., & Panchal, H. (2023). Performa of SCARA based intelligent 3 axis robotic soft gripper for enhanced material handling. Advances in Engineering Software, 176, 103366. https://doi.org/https://doi.org/10.1016/j.advengsoft.2022.103366
Fox, S., & Griffy-Brown, C. (2023). Robotics in society: Technology in Society Briefing. Technology in Society, 72(October 2022), 102174. https://doi.org/10.1016/j.techsoc.2022.102174
Goh, G. L., Yeong, W. Y., Altherr, J., Tan, J., & Campolo, D. (2022). 3D printing of soft sensors for soft gripper applications. Materials Today: Proceedings, 70, 224–229. https://doi.org/https://doi.org/10.1016/j.matpr.2022.09.025
Gu, T., Bi, H., Sun, H., Tang, J., Ren, Z., Zhou, X., & Xu, M. (2023). Design and development of 4D-printed cellulose nanofibers reinforced shape memory polymer composites: Application for self-deforming plant bionic soft grippers. Additive Manufacturing, 70, 103544. https://doi.org/https://doi.org/10.1016/j.addma.2023.103544
Han, J., Shan, X., Liu, H., Xiao, J., & Huang, T. (2023). Fuzzy gain scheduling PID control of a hybrid robot based on dynamic characteristics. Mechanism and Machine Theory, 184, 105283. https://doi.org/https://doi.org/10.1016/j.mechmachtheory.2023.105283
Jorg, O., & Fantoni, G. (2023). A self-adaptive high precision gripper for shape variant components: Towards higher reliability and efficiency of a cobotic cell. Journal of Manufacturing Systems, 70, 113–126. https://doi.org/https://doi.org/10.1016/j.jmsy.2023.04.003
Kumar, A., Raj, R., Kumar, A., & Verma, B. (2023). Design of a novel mixed interval type-2 fuzzy logic controller for 2-DOF robot manipulator with payload. Engineering Applications of Artificial Intelligence, 123, 106329. https://doi.org/https://doi.org/10.1016/j.engappai.2023.106329
Lee, K., & Cha, Y. (2023). Quasi-static analysis of an electrohydraulic actuator for a soft gripper. Sensors and Actuators A: Physical, 352, 114214. https://doi.org/https://doi.org/10.1016/j.sna.2023.114214
Ma, B., Zhang, Y., Li, J., Chen, D., Liang, R., Fu, S., & Li, D. (2023). 4D printing of multi-stimuli responsive rigid smart composite materials with self-healing ability. Chemical Engineering Journal, 466, 143420. https://doi.org/https://doi.org/10.1016/j.cej.2023.143420
Mehrjouyan, A., Menhaj, M. B., & Hooshiar, A. (2023). Safety-enhanced observer-based adaptive fuzzy synchronization control framework for teleoperation systems. European Journal of Control, 73, 100885. https://doi.org/https://doi.org/10.1016/j.ejcon.2023.100885
Park, H. I., Cho, T. J., Choi, I.-G., Rhee, M. S., & Cha, Y. (2023). Object classification system using temperature variation of smart finger device via machine learning. Sensors and Actuators A: Physical, 356, 114338. https://doi.org/https://doi.org/10.1016/j.sna.2023.114338
Ren, J., Wu, F., Shang, E., Li, D., & Liu, Y. (2023). 3D printed smart elastomeric foam with force sensing and its integration with robotic gripper. Sensors and Actuators A: Physical, 349, 113998. https://doi.org/https://doi.org/10.1016/j.sna.2022.113998
Sarkar, A., Maji, K., Chaudhuri, S., Saha, R., Mookherjee, S., & Sanyal, D. (2023). Actuation of an electrohydraulic manipulator with a novel feedforward compensation scheme and PID feedback in servo-proportional valves. Control Engineering Practice, 135, 105490. https://doi.org/https://doi.org/10.1016/j.conengprac.2023.105490
Wang, W., Tang, Y., & Li, C. (2021). International Journal of Mechanical Sciences. International Journal of Mechanical Sciences, 193, 196182. https://doi.org/10.1016/j.ijmecsci.2020.106181
Xu, D., Huang, J., Su, X., & Shi, P. (2019). Adaptive command-filtered fuzzy backstepping control for linear induction motor with unknown end effect. Information Sciences, 477, 118–131. https://doi.org/https://doi.org/10.1016/j.ins.2018.10.032
Yeong, W. Y., Goh, G. L., Goh, G. D., Lee, S., Altherr, J., Tan, J., & Campolo, D. (2022). 3D printing of soft grippers with multimaterial design: Towards shape conformance and tunable rigidity. Materials Today: Proceedings, 70, 525–530. https://doi.org/https://doi.org/10.1016/j.matpr.2022.09.552
Zhang, Y., Liu, T., Lan, X., Liu, Y., Leng, J., & Liu, L. (2022). A compliant robotic grip structure based on shape memory polymer composite. Composites Communications, 36, 101383. https://doi.org/https://doi.org/10.1016/j.coco.2022.101383
Zhang, Z., & Niu, Y. (2023). Probabilistic-constrained control of interval type-2 T–S fuzzy systems under the multi-node round-robin scheduling protocol. Journal of the Franklin Institute, 360(9), 6566–6584. https://doi.org/https://doi.org/10.1016/j.jfranklin.2023.04.033
Zhao, C., Yang, X., Yu, J., Yang, M., Wang, J., & Chen, S. (2023). Interval type-2 fuzzy logic control for a space nuclear reactor core power system. Energy, 280, 128102. https://doi.org/https://doi.org/10.1016/j.energy.2023.128102
Zheng, K., Zhang, Q., Peng, L., & Zeng, S. (2023). Adaptive memetic differential evolution-back propagation-fuzzy neural network algorithm for robot control. Information Sciences, 637, 118940. https://doi.org/https://doi.org/10.1016/j.ins.2023.118940
Palabras clave: Agarre bio-inspirado, Control difuso, Impresión 3D, Robótica suave.
Abstract: This paper presents the design of a robotic effector built with internal sensors in flexible material. Based on the bio-inspired grasping of thin, typically non-rigid objects made with two fingers by humans, the characteristics of model 3 are established, which serves as the basis for the printing of this model, including internal space for a flex resistance that allows identifying the percentage of flexion for grasping, using the effector. A fuzzy controller is designed to control the effector, and, given the tolerance of the sensor, a Mamdani type-2 fuzzy inference system is used. The results show an adequate grip that allows obtaining a steady state error close to zero, allowing one to grip thin objects such as a handkerchief or toilet paper.
Keywords: Bio-inspired grip, Fuzzy control, 3D Impression, Soft robotics.
1. INTRODUCCIÓN
El campo de la robótica y su impacto en la sociedad actual ha demarcado muchas líneas de aplicación e investigación(Fox & Griffy-Brown, 2023)
, donde uno de los aspectos relevantes se enfoca en el sistema de actuación o efector final Fox, S., & Griffy-Brown, C. (2023). Robotics in society: Technology in Society Briefing. Technology in Society, 72(October 2022), 102174. https://doi.org/10.1016/j.techsoc.2022.102174
(Amin et al., 2023)
. Estos han comenzado a diversificar su desarrollo al punto que su diseño involucra sensores e instrumentación Amin, Y., Gianoglio, C., & Valle, M. (2023). Embedded real-time objects’ hardness classification for robotic grippers. Future Generation Computer Systems, 148, 211–224. https://doi.org/10.1016/j.future.2023.06.002
(Bi et al., 2018)
, e incluso la capacidad de agarrar objetos deformables Bi, Z., Liu, Y., Krider, J., Buckland, J., Whiteman, A., Beachy, D., & Smith, J. (2018). Real-time force monitoring of smart grippers for Internet of Things (IoT) applications. Journal of Industrial Information Integration, 11, 19–28. https://doi.org/10.1016/j.jii.2018.02.004
(Wang et al., 2021)
. A la par del diseño, el efector requiere un sistema de control, por ejemplo, el clásico sistema basado en el error proporcional, integral y derivativo (PID) Wang, W., Tang, Y., & Li, C. (2021). International Journal of Mechanical Sciences. International Journal of Mechanical Sciences, 193, 196182. https://doi.org/10.1016/j.ijmecsci.2020.106181
(Sarkar et al., 2023)
, el cual para el caso de sistemas de diseño flexible e instrumentado puede tornarse complejo y requerir adaptaciones Sarkar, A., Maji, K., Chaudhuri, S., Saha, R., Mookherjee, S., & Sanyal, D. (2023). Actuation of an electrohydraulic manipulator with a novel feedforward compensation scheme and PID feedback in servo-proportional valves. Control Engineering Practice, 135, 105490. https://doi.org/https://doi.org/10.1016/j.conengprac.2023.105490
(Han et al., 2023)
. Una alternativa clara está en las técnicas de control basado en conocimiento como lo es el control difuso Han, J., Shan, X., Liu, H., Xiao, J., & Huang, T. (2023). Fuzzy gain scheduling PID control of a hybrid robot based on dynamic characteristics. Mechanism and Machine Theory, 184, 105283. https://doi.org/https://doi.org/10.1016/j.mechmachtheory.2023.105283
(An et al., 2023)
An, T., Zhu, X., Zhu, M., Ma, B., & Dong, B. (2023). Fuzzy logic nonzero-sum game-based distributed approximated optimal control of modular robot manipulators with human-robot collaboration. Neurocomputing, 543, 126276. https://doi.org/https://doi.org/10.1016/j.neucom.2023.126276
(Mehrjouyan et al., 2023)
Mehrjouyan, A., Menhaj, M. B., & Hooshiar, A. (2023). Safety-enhanced observer-based adaptive fuzzy synchronization control framework for teleoperation systems. European Journal of Control, 73, 100885. https://doi.org/https://doi.org/10.1016/j.ejcon.2023.100885
(Xu et al., 2019)
. Las técnicas de control de robots mediante sistemas difusos se integran hoy con algoritmos de inteligencia artificial dado sus beneficios frente al modelamiento Xu, D., Huang, J., Su, X., & Shi, P. (2019). Adaptive command-filtered fuzzy backstepping control for linear induction motor with unknown end effect. Information Sciences, 477, 118–131. https://doi.org/https://doi.org/10.1016/j.ins.2018.10.032
(Zheng et al., 2023)
, sin embargo, frente a algunos tipos de sensores que poseen rangos de tolerancia o variabilidad, los sistemas difusos tipo 2 son la mejor alternativa Zheng, K., Zhang, Q., Peng, L., & Zeng, S. (2023). Adaptive memetic differential evolution-back propagation-fuzzy neural network algorithm for robot control. Information Sciences, 637, 118940. https://doi.org/https://doi.org/10.1016/j.ins.2023.118940
(Z. Zhang & Niu, 2023)
Zhang, Z., & Niu, Y. (2023). Probabilistic-constrained control of interval type-2 T–S fuzzy systems under the multi-node round-robin scheduling protocol. Journal of the Franklin Institute, 360(9), 6566–6584. https://doi.org/https://doi.org/10.1016/j.jfranklin.2023.04.033
(Zhao et al., 2023)
, claramente aplicables a manipuladores robóticos que puedan presentar un diseño basado en un modelo no lineal Zhao, C., Yang, X., Yu, J., Yang, M., Wang, J., & Chen, S. (2023). Interval type-2 fuzzy logic control for a space nuclear reactor core power system. Energy, 280, 128102. https://doi.org/https://doi.org/10.1016/j.energy.2023.128102
(Kumar et al., 2023)
.Kumar, A., Raj, R., Kumar, A., & Verma, B. (2023). Design of a novel mixed interval type-2 fuzzy logic controller for 2-DOF robot manipulator with payload. Engineering Applications of Artificial Intelligence, 123, 106329.
Un aspecto adicional al control y que concierne al diseño del efector final es su capacidad de adaptación
(Jorg & Fantoni, 2023)
y esta se encuentra asociada a su aplicación, por ejemplo, si está orientada a asistencia a persona de tercera edad, requerirá ciertas especificaciones Jorg, O., & Fantoni, G. (2023). A self-adaptive high precision gripper for shape variant components: Towards higher reliability and efficiency of a cobotic cell. Journal of Manufacturing Systems, 70, 113–126. https://doi.org/https://doi.org/10.1016/j.jmsy.2023.04.003
(Chen et al., 2023)
. Para estos casos y algunos en industria se tienen diseños de efectores suaves Chen, K., Lou, V. W., & Cheng, C. Y. M. (2023). Intention to use robotic exoskeletons by older people: A fuzzy-set qualitative comparative analysis approach. Computers in Human Behavior, 141, 107610. https://doi.org/https://doi.org/10.1016/j.chb.2022.107610
(Dinakaran, Balasubramaniyan, Le, et al., 2023)
Dinakaran, V. P., Balasubramaniyan, M. P., Le, Q. H., Alrubaie, A. J., Al-khaykan, A., Muthusamy, S., Panchal, H., Jaber, M. M., Dixit, A. K., & Prakash, C. (2023). A novel multi objective constraints based industrial gripper design with optimized stiffness for object grasping. Robotics and Autonomous Systems, 160, 104303. https://doi.org/https://doi.org/10.1016/j.robot.2022.104303
(Lee & Cha, 2023)
. El diseño bioinspirado del efector, por ejemplo, tipo dedo Lee, K., & Cha, Y. (2023). Quasi-static analysis of an electrohydraulic actuator for a soft gripper. Sensors and Actuators A: Physical, 352, 114214. https://doi.org/https://doi.org/10.1016/j.sna.2023.114214
(Park et al., 2023)
con instrumentación asociada, presenta diseños conocidos como Smart [19], los cuales dado los sistemas de impresión desarrollados hoy día permiten pruebas que iteran resultados hasta su optimización Park, H. I., Cho, T. J., Choi, I.-G., Rhee, M. S., & Cha, Y. (2023). Object classification system using temperature variation of smart finger device via machine learning. Sensors and Actuators A: Physical, 356, 114338. https://doi.org/https://doi.org/10.1016/j.sna.2023.114338
(Ren et al., 2023)
, sea bajo impresión 3D Ren, J., Wu, F., Shang, E., Li, D., & Liu, Y. (2023). 3D printed smart elastomeric foam with force sensing and its integration with robotic gripper. Sensors and Actuators A: Physical, 349, 113998. https://doi.org/https://doi.org/10.1016/j.sna.2022.113998
(Goh et al., 2022)
Goh, G. L., Yeong, W. Y., Altherr, J., Tan, J., & Campolo, D. (2022). 3D printing of soft sensors for soft gripper applications. Materials Today: Proceedings, 70, 224–229. https://doi.org/https://doi.org/10.1016/j.matpr.2022.09.025
(Yeong et al., 2022)
o 4D Yeong, W. Y., Goh, G. L., Goh, G. D., Lee, S., Altherr, J., Tan, J., & Campolo, D. (2022). 3D printing of soft grippers with multimaterial design: Towards shape conformance and tunable rigidity. Materials Today: Proceedings, 70, 525–530. https://doi.org/https://doi.org/10.1016/j.matpr.2022.
(Ma et al., 2023)
Ma, B., Zhang, Y., Li, J., Chen, D., Liang, R., Fu, S., & Li, D. (2023). 4D printing of multi-stimuli responsive rigid smart composite materials with self-healing ability. Chemical Engineering Journal, 466, 143420. https://doi.org/https://doi.org/10.1016/j.cej.2023.143420
(Gu et al., 2023)
. Para lo cual la selección del material también entra a ser un parámetro de diseño Gu, T., Bi, H., Sun, H., Tang, J., Ren, Z., Zhou, X., & Xu, M. (2023). Design and development of 4D-printed cellulose nanofibers reinforced shape memory polymer composites: Application for self-deforming plant bionic soft grippers. Additive Manufacturing, 70, 103544. https://doi.org/https://doi.org/10.1016/j.addma.2023.103544
(Dinakaran, Balasubramaniyan, Muthusamy, et al., 2023)
Dinakaran, V. P., Balasubramaniyan, M. P., Muthusamy, S., & Panchal, H. (2023). Performa of SCARA based intelligent 3 axis robotic soft gripper for enhanced material handling. Advances in Engineering Software, 176, 103366. https://doi.org/https://doi.org/10.1016/j.advengsoft.2022.103366
(Y. Zhang et al., 2022)
que impacta tanto la sensórica interna como el controlador del efector.Zhang, Y., Liu, T., Lan, X., Liu, Y., Leng, J., & Liu, L. (2022). A compliant robotic grip structure based on shape memory polymer composite. Composites Communications, 36, 101383. https://doi.org/https://doi.org/10.1016/j.coco.2022.101383
Para el agarre de objetos delgados como papel o telas ligeras como pañuelos, no se han encontrado efectores finales que permitan orientar una aplicación asistencial a personas con algún tipo de problema motor para realizar esta tarea por sí mismos. Por ello y dada la tendencia en el estado del arte se propone y presenta el diseño de un efector robótico bioinspirado en el agarre de los dedos, impreso con material flexible e instrumentado con sensórica interna, el cual mediante un control difuso permita el agarre de objetos delgados y livianos tipo papel o pañuelos.
El siguiente documento se divide en cuatro secciones comprendidas en la actual introducción, la sección dos donde se presenta la metodología de diseño del efector y del sistema de control, la sección tres donde se presentan resultados de agarre y finalmente la seccion cuatro donde se exponen las conclusiones alcanzadas.
2. METODOLOGÍA
Con el objeto de evaluar la integración de la robótica suave y la asistencial, se establece un objetivo de diseño orientado al agarre de objetos finos y para las pruebas iniciales se focalizan en el agarre de objetos tipo pañuelos, toallas de mano y papel. Esto determina las características de agarre con que se diseña el efector final, el cual está orientado en el agarre humano, por lo que se emplea un diseño tipo dos dedos bioinspirado. Para controlar la fuerza del agarre se implementa un controlador difuso el cual se parametriza acorde al sensor empleado. Ambos aspectos tanto del diseño como de control se explican a continuación.2.1. Diseño del efector
Para el diseño del efector, el cual se orienta a ser parte de un robot asistencial capaz de suministrar a un usuario objetos delgados y no rígidos como toallas, pañuelos o papel, se determina un diseño bioinspirado en el agarre humano a dos dedos, como se aprecia en la Figura 1.Para este tipo de objetos el proceso de agarre surte de retraer los dedos uno hacia el otro, lo que implica una orientación de un dedo frente al otro. Por lo que el diseño del efector se establece bajo esta replica mediante dos dedos que se enfrenten al retraerse y cada uno implementado con dos falanges y una articulación (ver Figura 1) para cada lado del agarre implicado.
Fig. 1. Sistema de agarre bio-inspirado
Para el diseño final se emplearon herramientas CAD que permiten iterar las dimensiones del efector propuesto, Mediante pruebas iterativas se determinó como medidas finales un largo de 9 cm, un ancho de 1,4 cm y una distancia de articulación de inicio a punta del dedo del 40%. La Figura 5 ilustra el efector final empleado, donde los parámetros de impresión se ajustaron para uso de material flexible mediante TPU, con extrusor a 200°C, cama a 60°C y una densidad de relleno del 60%.La impresión en TPU permite una estructura no rígida que facilita la retracción del efector, a esta estructura se le realiza una sección hueca trasversal para inserción de un sensor que permita establecer el grado de retracción en la operación de agarre. Pruebas iterativas del diseño permitieron determinar la conveniencia de incluir en el diseño una saliente en el punto de agarre tipo yema.
Fig. 2. Diseño CAD del efector
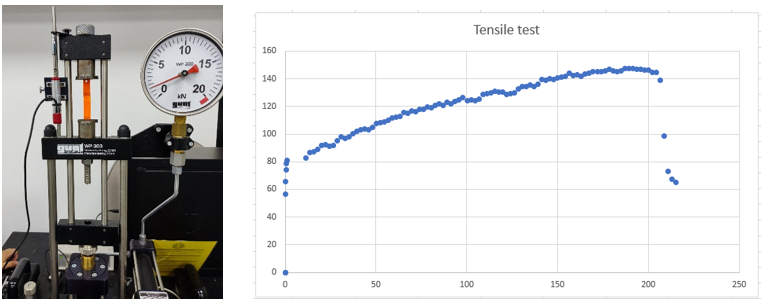
Dada la impresión del efector con material flexible, la atirculacion empleada y la cavidad del sensor, se realiza un prueba de tension del material para asegurar la integridad del mismo (ver Figura 3). Finalmente el efector no dio punto de ruptura y la deformacion se presenta significativa por la elasticidad del material empleado.
Fig. 3. Pruebas de tension del efector en material flexible
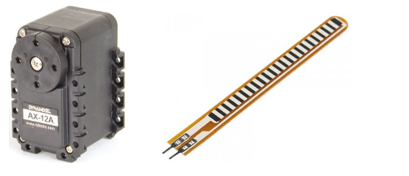
Para el diseño del controlador y dado la naturaleza flexible del efector de agarre se establece un sistema de control difuso como estrategia de regulación para ajuste del nivel de cierre. El actuador corresponde a un servomotor de referencia dynamixel AX12 que puede manejar un Torque máximo 15,3 kg • cm y el sensor de retroalimentación a una flexoresistencia tipo Flex sensor de 74mm que cuenta con 25K Ohm ±30% de tolerancia y un rango de variación de la resistencia en flexión de 45K Ohm a 125K Ohm.
Fig. 4. Servomotor y flexo-sensor empleados
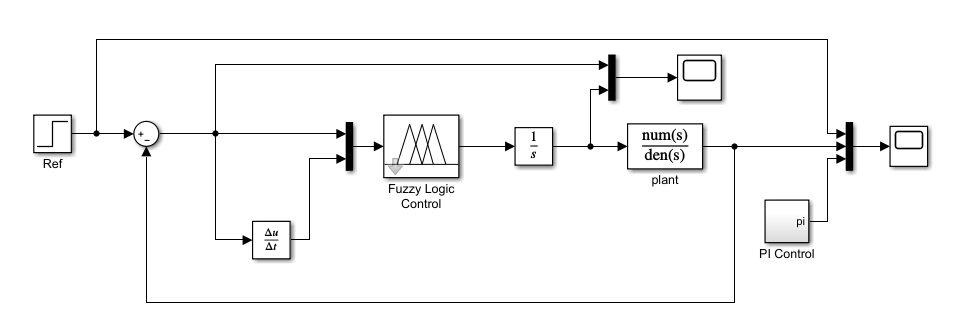
El lazo de control se evidencia en la figura 5, donde el controlador es de tipo proporcional derivativo y dado que la flexoresistencia tiene una tolerancia de ±30% se emplea un algoritmo basado en un sistema de inferencia difusa Mamdani tipo-2, el modelo de la simulación se obtiene aproximado mediante la herramienta de identificación de MATLAB®.
Fig. 5. Lazo de control difuso empleado para el efector.
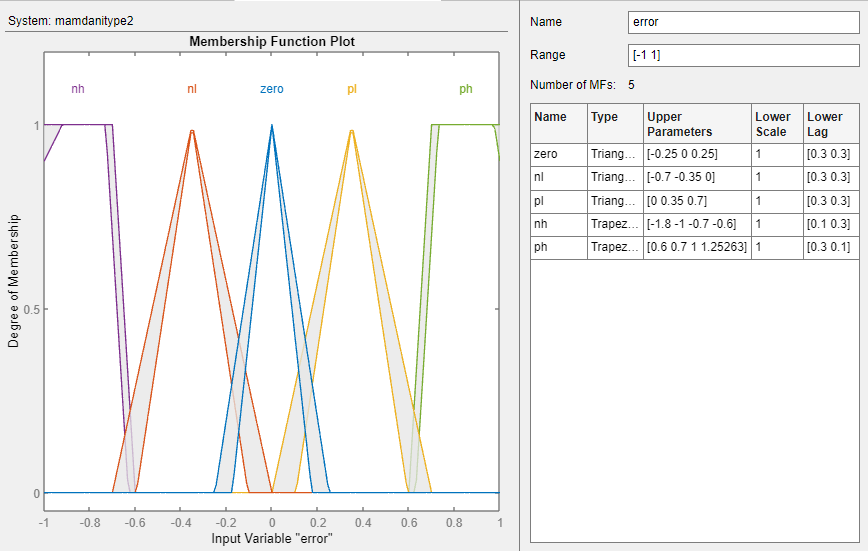
Los conjuntos difusos se establecen en el rango normalizado de menos uno a uno, que permite parametrizar la acción de control de la referencia al ±100% de error. Se emplean cinco funciones de pertenencia tanto para el error como para la derivada del error, con etiquetas lingüísticas son negativo alto (nh), negativo bajo (nl), cero (zero), positivo bajo (pl) y positivo alto (ph). El rango de tolerancia de ±0.3 se emplea para establecer las funciones de pertenencia interna como se aprecia en la figura 6.
Fig. 6. Conjunto difuso de entrada.
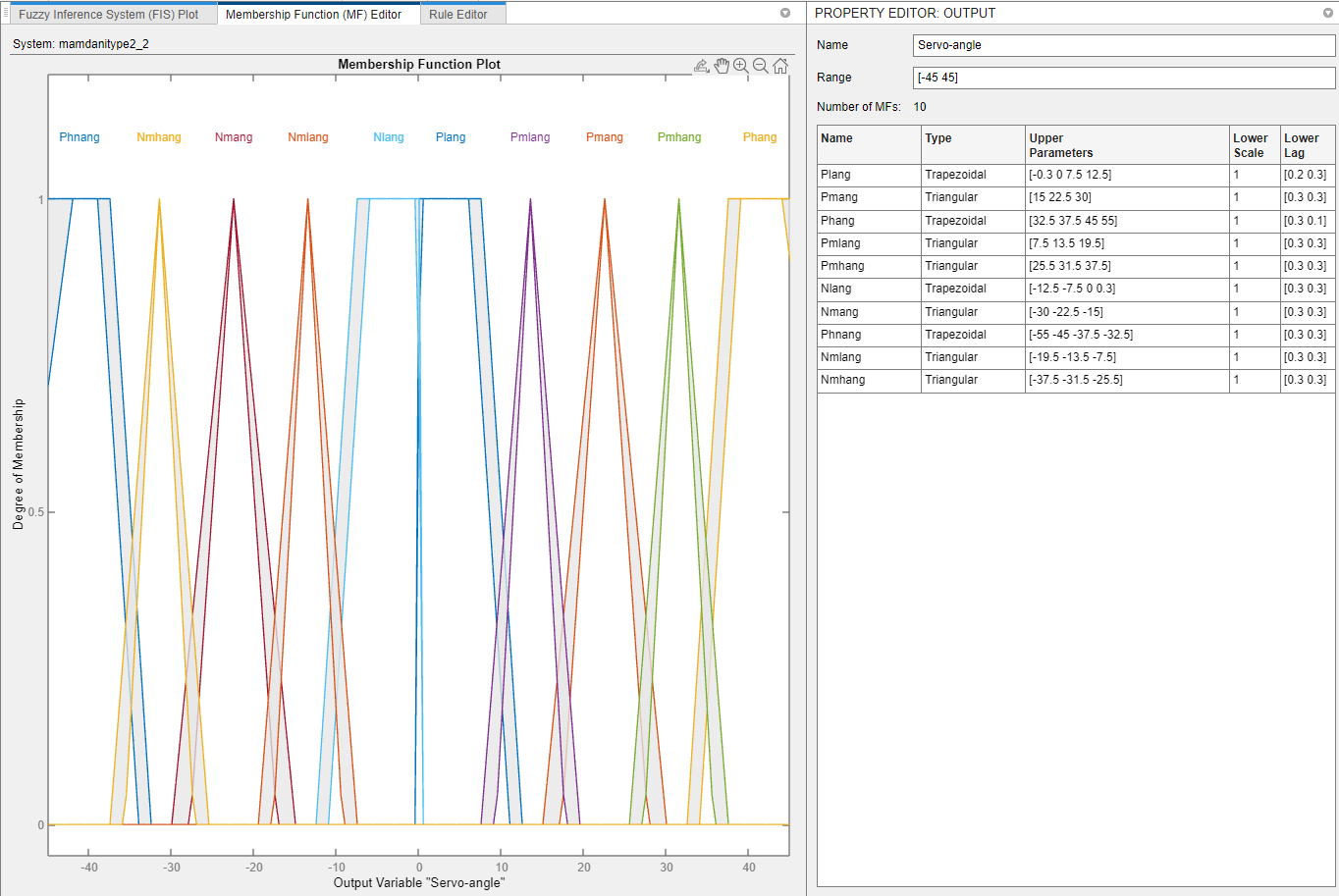
La salida difusa (Figura 7) corresponde al movimiento angular deseado del servomotor, que para el caso está caracterizado dentro de un rango de ±45°, que establece el porcentaje de apertura y cierre del efector para el agarre y liberación de objetos. A fin de poder tener un control preciso y continúo sobre los diferentes ángulos dentro del rango de variación, se establecen 10 funciones de pertenencia que permitan la variación suave del ángulo.
Fig. 7. Conjunto difuso de salida.
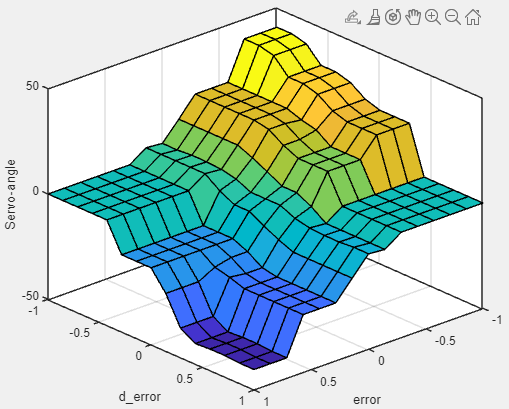
La figura 8 ilustra el comportamiento de resultante de la superficie de control, derivada de la base de reglas establecida. Se aprecia que la tendencia es suavizada y continua en todo el rango de operación del controlador, siendo un poco más incidente el parámetro de error que su razón de cambio. Se resalta que la etapa de instrumentación del sensor lleva una ganancia de 10.
Fig. 8. Superficie difusa de control.
3. RESULTADOS Y DISCUSIÓN
El efector final impreso se puede apreciar en la Figura 9, el sensor y los hilos de retracción (tendones) se insertan por los orificios internos y las conexiones al actuador por el orificio circular central.
Fig. 9. Impresión 3D del modelo final.
Las pruebas de agarre de papel y de una tela tipo pañuelo se tabulan en la tabla 1, evidenciando en un proceso iterativo de agarre de veinte pruebas por objeto (ver figura 10), un desempeño del 92,5% de eficacia en el trabajo del efector.Tabla 1: Pruebas de agarre
| OBJETO | AGARRES ACERTADOS |
|---|---|
| PAPEL | 19 |
| PAÑUELO | 18 |
| PROMEDIO EN PORCENTAJE | 92,5% |
Fig. 10. Pruebas de agarre.
Las pruebas fallidas se dieron para los casos en que el grosor de la superficie de agarre era muy delgado, por ejemplo, una capa sencilla de papel o el pañuelo extendido el lugar de doblado. Al no ser una superficie rígida y fría como lo pueden ser un efector metálico o de plástico, la interacción con el usuario se sintió natural, al entregar el objeto en la mano. La forma tipo dedo ayuda a la percepción visual de una interacción menos rígida o forzada frente a un agente robótico.La Figura 11 ilustra la acción de control del sistema de inferencia difusa donde para el caso se emplea la técnica de hardware in the loop (HIL), de forma que la información del sensor llega a la interfaz en simulink (MATLAB®), donde dependiendo del grosor del elemento de agarre se genera mayor acción para aumentar la presión y sostener el objeto.
Fig. 11. Pruebas de control de agarre.
Dentro del algoritmo de control, el usuario puede ajustar el parámetro de agarre como entrada del sistema a fin de que sea este quien determine inicialmente la magnitud de la acción de control y sea el controlador quien ajuste el actuador para mantener dicho parámetro. Se logra observa que la compensación del sistema difuso bajo el algoritmo Mamdani tipo-2 se acopla a las variaciones de medición de por tolerancia de la flexoresistencia estabilizando el sistema.4. CONCLUSIONES
Se logró obtener un efector robótico en material flexible que se acomoda al agarre de objetos delgados permitiendo recoger y entregar a un usuario final de forma acertada dicha objeto. La estructura empleada en el diseño del efector y el material demostró lograr una interacción natural con el usuario y mantener la estructura de objetos delicados como el papel.Los parámetros de diseño y la configuración de la impresión 3D son los elementos de mayor influencia en la construcción del efector, para lo cual se evidenció que es necesario un adecuado prediseño y establecimiento de prerrequisitos que disminuyan las iteraciones tanto en el entorno CAD de diseño como de su impresión.
RECONOCIMIENTO
Los autores agradecen Universidad Militar Nueva Granada y a la Universidad de los Llanos por los recursos, tiempos y espacios dispuestos para el desarrollo del presente trabajo.REFERENCIAS
Amin, Y., Gianoglio, C., & Valle, M. (2023). Embedded real-time objects’ hardness classification for robotic grippers. Future Generation Computer Systems, 148, 211–224. https://doi.org/10.1016/j.future.2023.06.002An, T., Zhu, X., Zhu, M., Ma, B., & Dong, B. (2023). Fuzzy logic nonzero-sum game-based distributed approximated optimal control of modular robot manipulators with human-robot collaboration. Neurocomputing, 543, 126276. https://doi.org/https://doi.org/10.1016/j.neucom.2023.126276
Bi, Z., Liu, Y., Krider, J., Buckland, J., Whiteman, A., Beachy, D., & Smith, J. (2018). Real-time force monitoring of smart grippers for Internet of Things (IoT) applications. Journal of Industrial Information Integration, 11, 19–28. https://doi.org/10.1016/j.jii.2018.02.004
Chen, K., Lou, V. W., & Cheng, C. Y. M. (2023). Intention to use robotic exoskeletons by older people: A fuzzy-set qualitative comparative analysis approach. Computers in Human Behavior, 141, 107610. https://doi.org/https://doi.org/10.1016/j.chb.2022.107610
Dinakaran, V. P., Balasubramaniyan, M. P., Le, Q. H., Alrubaie, A. J., Al-khaykan, A., Muthusamy, S., Panchal, H., Jaber, M. M., Dixit, A. K., & Prakash, C. (2023). A novel multi objective constraints based industrial gripper design with optimized stiffness for object grasping. Robotics and Autonomous Systems, 160, 104303. https://doi.org/https://doi.org/10.1016/j.robot.2022.104303
Dinakaran, V. P., Balasubramaniyan, M. P., Muthusamy, S., & Panchal, H. (2023). Performa of SCARA based intelligent 3 axis robotic soft gripper for enhanced material handling. Advances in Engineering Software, 176, 103366. https://doi.org/https://doi.org/10.1016/j.advengsoft.2022.103366
Fox, S., & Griffy-Brown, C. (2023). Robotics in society: Technology in Society Briefing. Technology in Society, 72(October 2022), 102174. https://doi.org/10.1016/j.techsoc.2022.102174
Goh, G. L., Yeong, W. Y., Altherr, J., Tan, J., & Campolo, D. (2022). 3D printing of soft sensors for soft gripper applications. Materials Today: Proceedings, 70, 224–229. https://doi.org/https://doi.org/10.1016/j.matpr.2022.09.025
Gu, T., Bi, H., Sun, H., Tang, J., Ren, Z., Zhou, X., & Xu, M. (2023). Design and development of 4D-printed cellulose nanofibers reinforced shape memory polymer composites: Application for self-deforming plant bionic soft grippers. Additive Manufacturing, 70, 103544. https://doi.org/https://doi.org/10.1016/j.addma.2023.103544
Han, J., Shan, X., Liu, H., Xiao, J., & Huang, T. (2023). Fuzzy gain scheduling PID control of a hybrid robot based on dynamic characteristics. Mechanism and Machine Theory, 184, 105283. https://doi.org/https://doi.org/10.1016/j.mechmachtheory.2023.105283
Jorg, O., & Fantoni, G. (2023). A self-adaptive high precision gripper for shape variant components: Towards higher reliability and efficiency of a cobotic cell. Journal of Manufacturing Systems, 70, 113–126. https://doi.org/https://doi.org/10.1016/j.jmsy.2023.04.003
Kumar, A., Raj, R., Kumar, A., & Verma, B. (2023). Design of a novel mixed interval type-2 fuzzy logic controller for 2-DOF robot manipulator with payload. Engineering Applications of Artificial Intelligence, 123, 106329. https://doi.org/https://doi.org/10.1016/j.engappai.2023.106329
Lee, K., & Cha, Y. (2023). Quasi-static analysis of an electrohydraulic actuator for a soft gripper. Sensors and Actuators A: Physical, 352, 114214. https://doi.org/https://doi.org/10.1016/j.sna.2023.114214
Ma, B., Zhang, Y., Li, J., Chen, D., Liang, R., Fu, S., & Li, D. (2023). 4D printing of multi-stimuli responsive rigid smart composite materials with self-healing ability. Chemical Engineering Journal, 466, 143420. https://doi.org/https://doi.org/10.1016/j.cej.2023.143420
Mehrjouyan, A., Menhaj, M. B., & Hooshiar, A. (2023). Safety-enhanced observer-based adaptive fuzzy synchronization control framework for teleoperation systems. European Journal of Control, 73, 100885. https://doi.org/https://doi.org/10.1016/j.ejcon.2023.100885
Park, H. I., Cho, T. J., Choi, I.-G., Rhee, M. S., & Cha, Y. (2023). Object classification system using temperature variation of smart finger device via machine learning. Sensors and Actuators A: Physical, 356, 114338. https://doi.org/https://doi.org/10.1016/j.sna.2023.114338
Ren, J., Wu, F., Shang, E., Li, D., & Liu, Y. (2023). 3D printed smart elastomeric foam with force sensing and its integration with robotic gripper. Sensors and Actuators A: Physical, 349, 113998. https://doi.org/https://doi.org/10.1016/j.sna.2022.113998
Sarkar, A., Maji, K., Chaudhuri, S., Saha, R., Mookherjee, S., & Sanyal, D. (2023). Actuation of an electrohydraulic manipulator with a novel feedforward compensation scheme and PID feedback in servo-proportional valves. Control Engineering Practice, 135, 105490. https://doi.org/https://doi.org/10.1016/j.conengprac.2023.105490
Wang, W., Tang, Y., & Li, C. (2021). International Journal of Mechanical Sciences. International Journal of Mechanical Sciences, 193, 196182. https://doi.org/10.1016/j.ijmecsci.2020.106181
Xu, D., Huang, J., Su, X., & Shi, P. (2019). Adaptive command-filtered fuzzy backstepping control for linear induction motor with unknown end effect. Information Sciences, 477, 118–131. https://doi.org/https://doi.org/10.1016/j.ins.2018.10.032
Yeong, W. Y., Goh, G. L., Goh, G. D., Lee, S., Altherr, J., Tan, J., & Campolo, D. (2022). 3D printing of soft grippers with multimaterial design: Towards shape conformance and tunable rigidity. Materials Today: Proceedings, 70, 525–530. https://doi.org/https://doi.org/10.1016/j.matpr.2022.09.552
Zhang, Y., Liu, T., Lan, X., Liu, Y., Leng, J., & Liu, L. (2022). A compliant robotic grip structure based on shape memory polymer composite. Composites Communications, 36, 101383. https://doi.org/https://doi.org/10.1016/j.coco.2022.101383
Zhang, Z., & Niu, Y. (2023). Probabilistic-constrained control of interval type-2 T–S fuzzy systems under the multi-node round-robin scheduling protocol. Journal of the Franklin Institute, 360(9), 6566–6584. https://doi.org/https://doi.org/10.1016/j.jfranklin.2023.04.033
Zhao, C., Yang, X., Yu, J., Yang, M., Wang, J., & Chen, S. (2023). Interval type-2 fuzzy logic control for a space nuclear reactor core power system. Energy, 280, 128102. https://doi.org/https://doi.org/10.1016/j.energy.2023.128102
Zheng, K., Zhang, Q., Peng, L., & Zeng, S. (2023). Adaptive memetic differential evolution-back propagation-fuzzy neural network algorithm for robot control. Information Sciences, 637, 118940. https://doi.org/https://doi.org/10.1016/j.ins.2023.118940
Universidad de Pamplona
I. I. D. T. A.
I. I. D. T. A.